
Roboterassistierte primäre Hüfttotalendoprothese – Fortschritt oder Marketing?
Sie sind bereits registriert?
Loggen Sie sich mit Ihrem Universimed-Benutzerkonto ein:
Sie sind noch nicht registriert?
Registrieren Sie sich jetzt kostenlos auf universimed.com und erhalten Sie Zugang zu allen Artikeln, bewerten Sie Inhalte und speichern Sie interessante Beiträge in Ihrem persönlichen Bereich
zum späteren Lesen. Ihre Registrierung ist für alle Unversimed-Portale gültig. (inkl. allgemeineplus.at & med-Diplom.at)
Seit der Einführung des RIO®-Systems im Jahr 2006 (MAKO) und der Übernahme durch die Firma Stryker im Jahr 2017 haben nahezu alle grossen Knieendoprothesenhersteller eigene robotische Systeme entwickelt. Neuerdings bieten das MAKO®-System (Firma Stryker) sowie das ROSA®-System (Firma Zimmer-Biomet) auch Lösungen für die Implantation einer Hüfttotalendoprothese (HTEP) an.
Keypoints
-
Zunehmend gefordert wird eine patient:innenspezifische, funktionelle Implantatpositionierung unter Berücksichtigung der individuellen spinopelvinen Beweglichkeit.
-
In der Literatur wird die höhere Präzision robotischer Systeme hinsichtlich Pfannenanteversion, -inklination sowie Beinlängenrekonstruktion konsistent bestätigt.
-
Die echten Vorteile der Technologie liegen insbesondere bei Risikopatient:innen – vor allem bei Hip-Spine-Patient:innen, komplexer Anatomie und erschwerten Operationsbedingungen.
Ein Blick in internationale Endoprothesenregister wirft zunächst die grundsätzliche Frage auf, ob bei der primären Hüft-TEP überhaupt eine relevante Verbesserung der Operationstechnik notwendig ist. Seit Jahren werden sehr hohe Patient:innenzufriedenheitsraten erreicht, gemessen u.a. am EQ-VAS-Score, während gleichzeitig die kumulativen Revisionsraten in den letzten 20 Jahren kontinuierlich gesunken sind.1 Auch die chirurgische Qualität der Implantation hat sich in den letzten Jahren stetig verbessert. Dies betrifft sowohl die Implantationsmaterialien als auch die chirurgischen Techniken und die perioperative Therapie.2 Betrachtet man jedoch die Daten des deutschen Endoprothesenregisters (EPRD), zeigt sich insbesondere innerhalb der ersten zwei Jahre nach Primärimplantation eine Revisionswahrscheinlichkeit von etwa 3%.3 Dies entspricht allein im Jahr 2024 rund 5800 Patient:innen in Deutschland. Neben Infektionen, Lockerungen, Osteolysen und periprothetischen Frakturen stellt die Luxation eine der häufigsten Ursachen für Folgeeingriffe dar,3 nicht selten infolge einer Fehlpositionierung der Implantatkomponenten.
Luxationsrisiko und patient:innenspezifische Faktoren
Die Analyse der Risikofaktoren für Hüftprothesenluxationen zeigt, dass insbesondere patient:innenspezifische und anatomische Gegebenheiten eine Rolle spielen, die potenziell durch eine optimierte Implantationstechnik adressiert werden können.4
Dazu zählen:
-
komplexe knöcherne Anatomien (z.B. Hüftdysplasie,5 posttraumatische Zustände)
-
erschwerte Operationsbedingungen, etwa bei stark adipösen Patient:innen (BMI >35)6
-
eine veränderte spinopelvine Beweglichkeit4
Patient:innen mit einem sogenannten Hip-Spine-Syndrom weisen ein deutlich erhöhtes Luxationsrisiko auf. Eine einliegende lumbale Wirbelsäulenfusion gilt dabei als signifikanter patient:innenspezifischer Risikofaktor für Luxationen und Revisionen, insbesondere innerhalb der ersten sechs Monate nach Primärimplantation.7 Allerdings ist nicht nur die offensichtliche Fusion entscheidend. Auch degenerative Veränderungen der Wirbelsäule können zu einer pathologischen Beckenkippung führen, die wiederum Impingement und Luxationen begünstigt. Die klassische Orientierung an der «safe zone» nach Lewinnek, definiert 1978 anhand von 300 Hüft-TEPs auf Grundlage eines a.p.-Röntgenbildes im Liegen,8 berücksichtigt diese individuelle spinopelvine Dynamik nicht. Zahlreiche Studien zeigen, dass selbst korrekt in dieser «safe zone» positionierte Pfannen während funktioneller Aktivitäten wie Stehen und Gehen häufig ausserhalb dieser Zone liegen und dennoch Luxationen auftreten können.8,9,10 Die alleinige Orientierung an der statischen Lewinnek-«safe zone» verliert daher insbesondere bei Risikopatient:innen zunehmend an Bedeutung.
Funktionelle Implantatpositionierung und Robotik
Zunehmend gefordert wird eine patient:innenspezifische, funktionelle Implantatpositionierung unter Berücksichtigung der individuellen spinopelvinen Beweglichkeit.11 Dabei werden Zielwerte für Anteversion und Inklination auf Basis der gemessenen Veränderungen zwischen verschiedenen Körperpositionen (Stehen, Sitzen, Liegen) definiert und an die Stadien der Hip-Spine-Klassifikation angepasst.12 Diese Zielwerte können mittlerweile mithilfe mathematischer Modelle und Algorithmen berechnet werden, etwa unter Einbeziehung des kombinierten sagittalen Index (CSI), der sich aus dem Pelvic-Femur-Winkel und der sagittalen Pfanneninklination zusammensetzt.13 Da die Zielbereiche hierbei sehr eng definiert sind und bereits Abweichungen von wenigen Grad wiederum das Luxationsrisiko erhöhen, wird die Limitation der manuellen Technik deutlich. Bereits Callanan et al. zeigten 2011, dass bei konventioneller Implantation nur etwa 50% der Pfannen innerhalb der angestrebten Zielposition platziert werden.14 Hier zeigen Navigation und Robotik klare Vorteile: Sie ermöglichen eine präzise, reproduzierbare und funktionell ausgerichtete Pfannenpositionierung unter Berücksichtigung der individuellen spinopelvinen Eigenschaften sowie einer virtuellen Impingement-Analyse – auch unter erschwerten anatomischen oder operativen Bedingungen und weitgehend zugangsunabhängig.
Operationstechnik mit bildbasierter Robotik (MAKO®)
Die bildbasierte Robotik mit dem MAKO®-Roboterarm erfordert präoperativ ein CT des Beckens sowie axiale CT-Schichten des Femurs und Kniegelenks zur Bestimmung der femoralen Rotation. Zusätzlich werden seitliche Röntgenaufnahmen der Lendenwirbelsäule und des Beckens im Stehen und Sitzen angefertigt, um spinopelvine Parameter und Veränderungen des «pelvic tilt» zu erfassen. Nach CT-Segmentierung wird ein patient:innenspezifisches 3D-Modell erstellt. Darauf basierend erfolgen die präoperative Pfannen- und Schaftplanung sowie eine virtuelle Impingement-Kontrolle mittels Virtual Range of Motion (VROM). Bewegungen im Stehen, Sitzen und Liegen können simuliert und potenzielle Impingements durch Anpassung der Implantatpositionierung vermieden werden. Beinlänge und Offset lassen sich millimetergenau planen. Intraoperativ unterstützt der Roboterarm beim Fräsen und bei der Pfannenimplantation. Es stehen zwei Workflows zur Verfügung:
-
Unter Enhanced Workflow versteht man die vollständige Registrierung von Acetabulum und Femur, eine navigierte Schenkelhalsresektion sowie initiale Bestimmung der Schaftversion mit anschliessender Optimierung der kombinierten Anteversion über die Pfannenposition.
-
Express Workflow verläuft ohne vollständige Femurregistrierung; Beinlänge und Offset werden indirekt über Checkpoints bestimmt. Trotz reduzierten Aufwands zeigt sich eine vergleichbare Genauigkeit,15 sodass der Enhanced Workflow insbesondere bei femoraler Pathologie (z.B. Dysplasie mit erhöhter Antetorsion) empfohlen wird.
Evidenz, Limitationen und klinische Relevanz
In der Literatur wird die höhere Präzision robotischer Systeme hinsichtlich Pfannenanteversion, -inklination sowie Beinlängenrekonstruktion konsistent bestätigt.16,17 Mehrere Studien zeigen zudem eine signifikante Reduktion der Luxationsrate sowohl innerhalb der ersten 90 Tage als auch nach einem Jahr.18,19 Demgegenüber unterscheiden sich funktionelle Outcomes (PROMs) im Vergleich zur konventionellen Technik bislang nicht signifikant,wenngleich eine positive Tendenz beschrieben wird.20–23 Auch allgemeine Komplikationsraten und das Implantatüberleben sind vergleichbar.23 Zudem sind aktuell relevante Limitationen der Robotertechnik vorhanden: hohe Anschaffungs- und Betriebskosten, zusätzliche Einwegmaterialien (Pins, Marker), die notwendige präoperative CT-Diagnostik mit zusätzlicher Strahlenexposition sowie eine nicht zu unterschätzende Lernkurve für den Operateur. Eine weitere Einschränkung ist die derzeitige Bindung der Robotik an herstellerspezifische Implantatsysteme, was insbesondere in komplexen Fällen die Flexibilität limitiert.
Wo liegen die echten Vorteile?
Die klinischen Vorteile der roboterassistierten Hüft-TEP zeigen sich bei definierten Risikogruppen. Insbesondere bei Patient:innen mit veränderter spinopelviner Beweglichkeit konnte – etwa bei der Hip-Spine-Klassifikation Typ 2B – eine signifikante Reduktion der Luxationsrate nachgewiesen werden.24 Auch in eigenen Fallbeispielen, etwa bei einer 47-jährigen Patientin mit fixierter dorsaler Beckenkippung, eingeschränkter Wirbelsäulenbeweglichkeit (Hip-Spine-2B) und beidseitiger fortgeschrittener Coxarthrose, konnte ohne Verwendung einer Dual-Mobility-Pfanne durch präoperative VROM-Analyse und funktionelle Implantatpositionierung eine stabile, freie postoperative Beweglichkeit erreicht werden. Auch beim 6-Monats-Follow-up zeigen sich keine Dislokationen bei freier Beweglichkeit (Abb.1+2). Ebenso profitieren Patient:innen mit komplexer Anatomie (Hüftdysplasie, posttraumatische Deformitäten) oder extrem erschwerten Bedingungen (Adipositas permagna) von der verbesserten Planbarkeit und intraoperativen Präzision.

Abb. 1: Intraoperative Aufnahme einer Prothesenpfannenimplantation unter Verwendung eines vom Roboterarm geführten Einschlägers
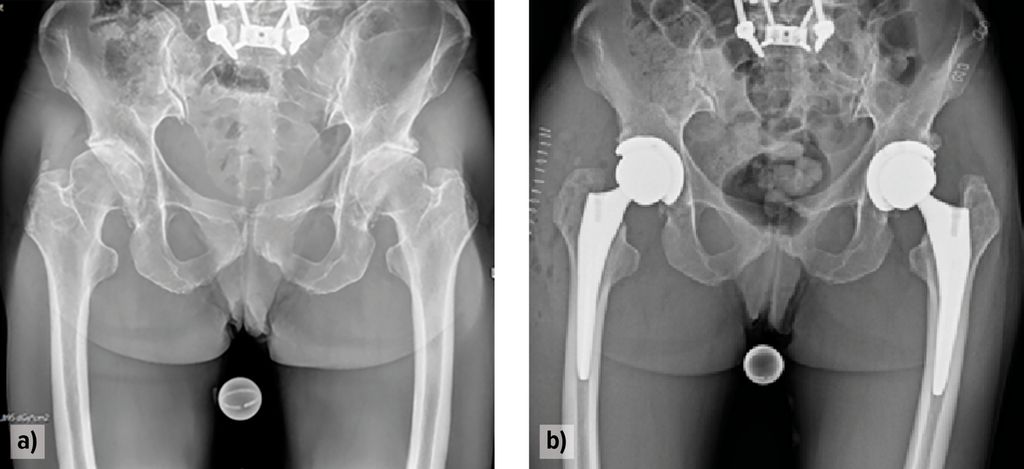
Abb. 2: Hüfttotalendoprothesen-Implantation unter roboterassistierter Ausrichtungsoptimierung und Impingement-Analyse bei einer 47-jährigen Hochrisikopatientin mit einliegender Wirbelsäulenfusion (Hip-Spine-Klassifikation 2B) und beidseitiger Coxarthrose; (a) präoperativ, (b) postoperativ
Fazit
Die roboterassistierte Implantation der Hüfttotalendoprothese ermöglicht eine exakte dreidimensionale funktionelle Planung und deren präzise intraoperative Umsetzung. Auch wenn bislang kein eindeutiger Vorteil im funktionellen Outcome nachgewiesen ist, zeigt sich eine relevante Reduktion der Luxationsrate. Die echten Vorteile der Technologie liegen daher insbesondere bei Risikopatient:innen – vor allem bei Hip-Spine-Patient:innen, komplexer Anatomie und erschwerten Operationsbedingungen.
Factbox
Die klinisch relevantesten Vorteile der roboterassistierten Hüft-TEP zeigen sich bei definierten Risikogruppen. Insbesondere bei Patient:innen mit veränderter spinopelviner Beweglichkeit konnte eine signifikante Reduktion der Luxationsrate durch den Einsatz robotischer Systeme nachgewiesen werden.24
Literatur:
1 Porter M et al.: International registries: UK national joint registry, Nordic registries, and Australian Orthopaedic Association national joint replacement registry (AOANJRR). JBJS 2022; 104(Suppl 3): 23-7 2 Ferguson RJ et al.: Hip replacement. The Lancet 2018; 392(10158): 1662-71 3 Grimberg A et al.: EPRD-Jahresbericht 2024. 2024: EPRD Deutsche Endoprothesenregister Berlin 4 Hernigou P et al.: Hip arthroplasty dislocation risk calculator: evaluation of one million primary implants and twenty-five thousand dislocations with deep learning artificial intelligence in a systematic review of reviews. International Orthopaedics 2023; 47(2): 557-71 5 Salman LA et al.: The outcomes of total hip arthroplasty in developmental dysplasia of hip versus osteoarthritis: a systematic review and meta-analysis. European Journal of Orthopaedic Surgery & Traumatology 2024; 34(1): 1-8 6 Klemt C et al.: Outcome and risk factors of failures associated with revision total hip arthroplasty for recurrent dislocation. Archives of Orthopaedic and Trauma Surgery 2022; 142(8): 1801-7 7 Malkani AL et al.: Does timing of primary total hip arthroplasty prior to or after lumbar spine fusion have an effect on dislocation and revision rates? The Journal of Arthroplasty 2019; 34(5): 907-11 8 Lewinnek GE et al.: Dislocations after total hip-replacement arthroplasties. Jbjs 1978; 60(2): 217-20 9 Zheng N et al.: Well-placed acetabular component oriented outside the safe zone during weight-bearing daily activities. Frontiers in Bioengineering and Biotechnology 2021; 9: 664907 10 Dorr LD, Callaghan JJ: Death of the Lewinnek “safe zone”. The Journal of Arthroplasty 2019; 34(1): 1-2 11 Vigdorchik JM et al.: Templating for total hip arthroplasty in the modern age. JAAOS-Journal of the American Academy of Orthopaedic Surgeons 2021; 29(5): e208-e216 12 Ramkumar PN et al.: Patient-specific safe zones for acetabular component positioning in total hip arthroplasty: mathematically accounting for spinopelvic biomechanics. The Journal of Arthroplasty 2023; 38(9): 1779-86 13 Jeffrey M et al.: Short-term functional outcomes of robotic-assisted TKA are better with functional alignment compared to adjusted mechanical alignment. SICOT-J 2024; 10: 2 14 Callanan MC et al.: The John Charnley Award: risk factors for cup malpositioning: quality improvement through a joint registry at a tertiary hospital. Clinical Orthopaedics and Related Research® 2011; 469(2): 319-29 15 Cozzi Lepri A et al.: Precision and accuracy of robot-assisted technology with simplified express femoral workflow in measuring leg length and offset in total hip arthroplasty. The International Journal of Medical Robotics and Computer Assisted Surgery 2020; 16(5): 1-6 16 Annapareddy A et al.: A radiological comparison of robotic-assisted versus manual techniques in total hip arthroplasty. Indian Journal of Orthopaedics 2024; 58(10): 1423-30 17 Fontalis A et al.: A prospective randomized controlled trial comparing CT-based planning with conventional total hip arthroplasty versus robotic arm-assisted total hip arthroplasty. The Bone & Joint Journal 2024; 106(4): 324-35 18 Swartz GN et al.: Robotic-assistance in total hip arthroplasty is associated with decreased dislocation rates. Arthroplasty Today 2024; 30: 101473 19 Howell C et al.: Postoperative complications and readmission rates in robotic-assisted and manual total hip arthroplasty: A large, multi-hospital study. Medical Care 2024; 10.1097 20 Ng N et al.: Robotic arm-assisted versus manual total hip arthroplasty: a systematic review and meta-analysis. The Bone & Joint Journal 2021; 103(6): 1009-20 21 Fontalis A et al.: Patient-reported outcome measures in conventional total hip arthroplasty versus robotic-arm assisted arthroplasty: a prospective cohort study with minimum 3 years’ follow-up. The Journal of Arthroplasty 2023; 38(7): S324-S329 22 Loke RWK et al.: MAKO robotic-assisted compared to conventional total hip arthroplasty for hip osteoarthritis: a systematic review and meta-analysis. Journal of Orthopaedic Surgery and Research 2025; 20(1): 466 23 Clement ND et al.: Robotic arm-assisted versus manual total hip arthroplasty: a propensity score matched cohort study. Bone & Joint Research 2021; 10(1): 22-30 24 Karasavvidis T et al.: (2024). Decreased instability in high-risk (Hip–Spine 2B) patients after modifications of surgical planning and technique. The Journal of Arthroplasty 2024; 39(9): 138-44
Das könnte Sie auch interessieren:

Drogen und Anabolika: vom Sportplatz auf die Intensivstation
Anabolika und Drogen sind im Sport verboten. Athlet:innen nehmen dennoch immer wieder solche Substanzen ein – und riskieren neben Disziplinarverfahren vor allem auch ihre Gesundheit oder ...

Screening psychosozialer Faktoren in der Schmerzmedizin
Psychosoziale Faktoren beeinflussen in Interaktion mit biologischen Faktoren die Entstehung, Chronifizierung und Aufrechterhaltung von Schmerzen und sollten deshalb frühzeitig erfasst ...

Herpes zoster im Gesicht
Während ein Herpes zoster im Bereich des Thorax meist gut hausärztlich behandelt werden kann, empfiehlt sich bei einem Auftreten im Kopf-Hals-Bereich meist die interdisziplinäre ...