Robotik in der Knieendoprothetik: Systemübersicht und Möglichkeiten
Sie sind bereits registriert?
Loggen Sie sich mit Ihrem Universimed-Benutzerkonto ein:
Sie sind noch nicht registriert?
Registrieren Sie sich jetzt kostenlos auf universimed.com und erhalten Sie Zugang zu allen Artikeln, bewerten Sie Inhalte und speichern Sie interessante Beiträge in Ihrem persönlichen Bereich
zum späteren Lesen. Ihre Registrierung ist für alle Unversimed-Portale gültig. (inkl. allgemeineplus.at & med-Diplom.at)
Die größte Innovation der Knieendoprothetik der letzten Jahrzehnte wird durch die Einführung moderner Robotersysteme geprägt. Mehrheitlich ist „Marketing – Werkzeug – Roboter“ für viele Anwender als extrinsische Motivation im Vordergrund, um sich gegenüber der Konkurrenz zu positionieren. Die Computerunterstützung erlaubt dem Chirurgen jede komplexe Alignmentstrategie sicher und exakt zu realisieren, ohne ungewollte Ausreißer akzeptieren zu müssen. Diese ungeahnten Tiefen von präoperativen 3D-Planungsmöglichkeiten und intraoperativen Echtzeitinformationen lassen jedes Chirurgenherz höherschlagen und Randbereiche ergründen, in die wir uns konventionell niemals vorgewagt hätten.
Die Einführung dieser neuen, aber sehr kostspieligen Technologie hat in vielen Ländern einen Hype ausgelöst, der die Endoprothetikindustrie förmlich zwingt, ein eigenes System auf den Markt zu bringen, um eine Abwanderung der Kunden zum Konkurrenzunternehmen zu verhindern. Die hohen Investitionskosten zur Anschaffung eines Roboters binden den Anwender langfristig an den Hersteller, weshalb die Entscheidung mit Bedacht gefällt werden muss. Am Kepler Universitätsklinikum Linz wurde nach ausgewogener Analyse des Marktes die Entscheidung zum Einsatz von Robotik für Knie- und Hüftendoprothetik getroffen.
In der Literatur und den Endoprothesenregistern wurden bereits Vorteile, wie bessere Funktion, geringeres Weichteiltrauma und Blutverlust,1 längere mittlere Implantatstandzeiten2 und genauere Implantatpositionierung3 publiziert. Die meisten Autoren dieser Veröffentlichungen kooperieren direkt oder indirekt mit den Herstellerfirmen. Somit ist es die Aufgabe der unabhängigen Universitäten, unabhängige Langzeiterhebungen durchzuführen, um die langfristigen sinnvollen Vorteile des Robotereinsatzes nachzuweisen. Diese Aufgabe wird schwieriger, da derzeit kein allgemeiner Konsens über die ideale Positionierung eines Knieimplantates besteht.
Möglichkeiten
Die neutrale Ausrichtung der Knieendoprothese zur mechanischen Beinachse wurde lange als Goldstandard für Standzeit und Funktion angesehen.4 Bellemanns et al. konnten 2012 mit einer mit dem Chitranjan Ranawat Award ausgezeichneten Publikation5 zeigen, dass nur die Minderheit einer Bevölkerung eine tatsächlich gerade Beinachse aufweist und dass das klassische mechanische Alignment nur einen Kompromiss darstellt, die Prothese durch ausgedehnten Weichteilrelease der Extremität „aufzuzwingen“, ohne dabei die Natur der dynamischen dreidimensionalen Gelenkslinie und der natürlichen Weichteilspannung des Kniegelenks zu respektieren.
Stephen Howell beschreibt bereits 2006 das Konzept des kinematischen Alignments. Hierbei handelt es sich um eine Ausrichtung des Kunstgelenks entsprechend der nativen Patientenanatomie in allen drei Ebenen des Raumes. Die natürlichen ligamentären Strukturen werden in ihrer Position und Spannung respektiert, die Endoprothese wird an den Patienten individuell angepasst.6
Das einfache Prinzip des „resurfacing“ wird von jedem Kniechirurgen an der Schlittenprothese mit Erfolg regelhaft angewendet. Die exakte dreidimensionale Prothesenpositionierung und Berücksichtigung der Weichteile und Gelenkslinie sind mit konventionellen Instrumenten schwierig und führen zu Ausreißern, die vermieden werden sollen.7
Das robotikassistierte Operationsverfahren erlaubt sicher und ohne Fehlpositionen, das Implantat entsprechend der Chirurgenvorstellung zu positionieren und die natürliche Weichteilspannung wiederherzustellen. Jeder Operationsschritt kann intraoperativ verifiziert und in feinen Nuancen nachgebessert werden. Es eröffnet dem Chirurgen eine Welt des Umdenkens. „Knöcherne Releases“ (sog. händisches Nachschleifen), die in der Gruppe von „Gap-Balancern“ nach Gefühl vor Implantation ausgeführt worden sind, können nun auf das halbe Grad genau zu jedem Zeitpunkt der Operation kontrolliert, sicher und ohne Pressfit-Verlust des Implantats umgesetzt und nachgebessert werden.
Das Ziel dieser Zusammenfassung ist es, einen Überblick über die verschiedenen, aktuell oder in naher Zukunft verfügbaren Robotertypen darzustellen und die Vorteile und Grenzen dieser neuen Innovation aufzuzeigen.
Bildbasierende und bildfreie Robotik
In der robotikassistierten Endoprothetik wird die individuelle Anatomie des Patienten entweder bildfrei durch Oberflächenabtastung oder bildbasierend durch präoperativ durchgeführte CT- oder errechnete 3D-Modelle aus konventionellem Röntgen erstellt. Bildbasierende Systeme können bereits präoperativ die Implantatpositionierung und die Sägeschnitte exakt vorausplanen. Bildfreie Systeme verlegen die Planung der Implantatgröße und Positionierung in den Operationssaal nach dem entsprechenden Oberflächenmapping.
Intraoperativ wird in Echtzeit die Planung an die reale Situation und Bandspannung adaptiert und mit optischen Trackern entsprechend der konventionellen Navigation und mit der Roboterunterstützung umgesetzt. Mehrheitlich werden absolute Abstände zwischen der femoralen und der tibialen Komponente in der Dynamik dargestellt. Objektive Druckmessungen, Gleit-, Rotations- und Rollback-Verhalten vom Femur zur Tibia werden in Zukunft als weitere objektivierbare Größen von den Systemen berücksichtigt.
Klassifikation der Robotiksysteme
In der Endoprothetik können die Robotersysteme in aktive, semiaktive und passive Systeme eingeteilt werden.8 Passive Systeme bestehen aus einem Roboterarm, der ein Instrument hält und vom Chirurgen manuell bewegt wird. Die Position wird von einem Navigationssystem erkannt. Die aktiven Operationsschritte werden vom Chirurgen ausgeführt. Der OMNIBOT-Roboter ist ein Beispiel für diese Klasse. Ein aktiver Roboter führt die Sägeschnitte selbstständig aus, ein Mitwirken des Chirurgen ist nicht erforderlich.
Interaktive Robotersysteme beschreiben die Interaktion zwischen Chirurgen und Maschine. Der sogenannte semiaktive Roboter kombiniert die optische Kontrolle mit semiautonomen Sägeschnitten. Der Chirurg führt eine Säge oder Fräse und kann einerseits selbst den Vorgang wie gewohnt beenden, wird jedoch zusätzlich durch eine haptische Kontrolle des Roboters und entsprechend präoperativ definierte virtuelle Sicherheitszonen begrenzt. Dadurch besteht die höchstmögliche Sicherheit, und Weichteile, wie z.B. das hintere Kreuzband, können vollständig erhalten werden, wie es bisher nur mit vermehrtem chirurgischem Aufwand möglich war.9 Die Implantatpositionierung kann in Echtzeit entsprechend der Weichteilspannung bereits vor der Ausführung der Sägeschnitte simuliert und exakt prognostiziert werden.
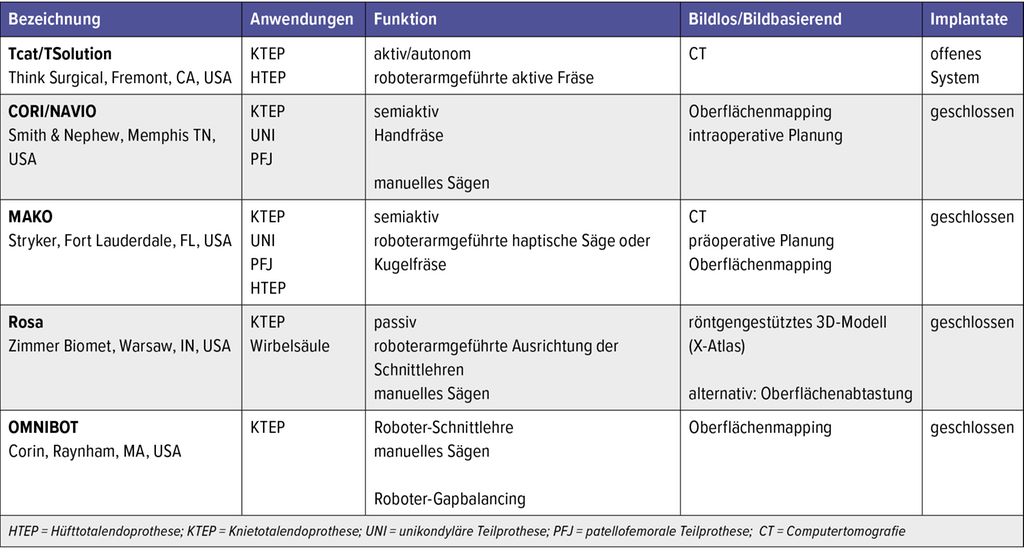
Tab. 1: Endoprothesen-Robotersysteme, aktuell zugelassene Anwendungen
Robotersysteme
Mit dem Robodoc (Curexo Technology, Fremont, CA, USA), einem aktiven oder vollständig autonom arbeitenden Operationsroboter, der von der Firma Sanko-Seiki entwickelt wurde, hat die Robotik in der Endoprothetik vor fast 30 Jahren ihren unrühmlichen Anfang genommen. Es kam zu einer Häufung von Komplikationen, Knochen- und Weichteilverletzungen10, was die berechtigte anhaltende Skepsis erfahrener Kollegen begründete.
Der Nachfolger TSolution-One (THINK Surgical Inc, Fremont, CA, USA) ist die einzige offene roboterassistierte Plattform, die autonom die Knochenoberfläche mittels Kugelfräse zuschneiden kann. Die Planung erfolgt präoperativ am CT-3D-Modell. Der Chirurg führt den Standardzugang zum Gelenk, positioniert Stabilisierungspins und Navigationsmarkierungen, verifiziert die Bewegungssensoren und anatomischen Landmarken. Das System führt die Oberflächenschnitte autonom mit einer Kugelfräse aus und kann mit einem Notschalter deaktiviert werden.11
TSolution-One zeigt im Vergleich zu seinem Vorgänger auch als voll autonome/aktive Lösung gute klinische Ergebnisse und eine exzellente Rekonstruktion der mechanischen Beinachse.12,13 Die Resultate zeigen kein besseres Ergebnis im Vergleich zur konventionell implantierten Knieendoprothese.11
Der Roboter Rosa wurde von der Firma Zimmer-Biomet (Warsaw, IN, USA) entwickelt und Anfang 2019 von der FDA zugelassen. Es handelt sich um einen interaktiven Roboterarm, der die konventionellen Sägeschnittblöcke positionieren kann. Grundsätzlich handelt es sich um ein bildfreies System und kann als solches auch verwendet werden. Die entsprechenden Landmarken werden ähnlich wie bei der herkömmlichen Navigation erfasst. Zusätzlich verwendet Rosa herkömmliche Röntgenaufnahmen. Der Patient trägt zur Kalibrierung Röntgenmarker an Femur und Tibia.14 Zimmer-Biomet generiert durch die sogenannte X-Atlas-Technologie ein dreidimensionales Patientenmodell, welches für die präoperative Planung auf das Rosa-System übertragen wird. Der Vorteil liegt in der Einsparung der Computertomografie und der damit verbundenen Strahlenbelastung. Daten zur Modellpräzision sind noch nicht veröffentlicht; insbesondere bei ausgeprägten Dysplasien oder posttraumatischen Situationen könnten theoretisch Systemeinschränkungen auftreten.
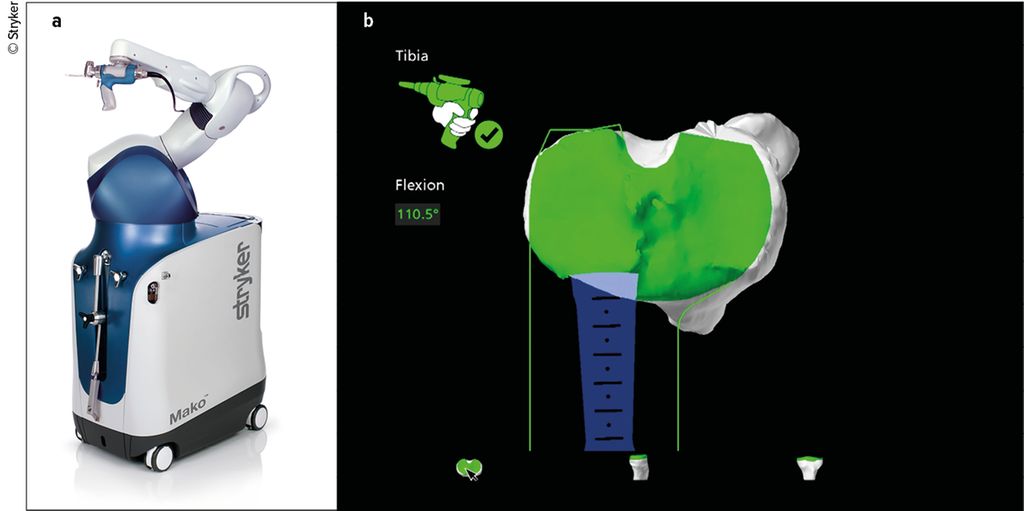
Abb. 1: a) Mako-System: totaler Kniegelenkersatz, b) Mako-Knochenpräparation beim totalen Kniegelenkersatz (mit freundlicher Genehmigung von Fa. Stryker)
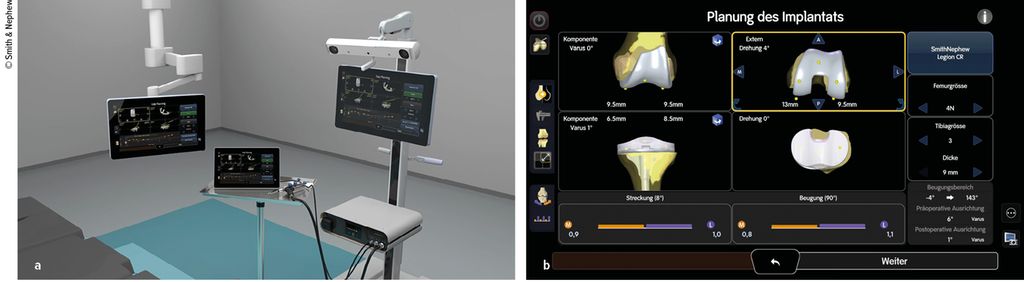
Abb. 2: a) Robotiksystem Cori, b) Cori-Planungstool (mit freundlicher Genehmigung von Fa. Smith & Nephew)

Abb. 3: a) Rosa Robotiksystem, b) Rosa Roboterarm (mit freundlicher Genehmigung von Fa. Zimmer Biomet)
Intraoperativ erfolgen eine interaktive Weichteilbalancierung und Anpassung der Planung an die reale Situation. Nach der robotikassistierten Platzierung der Sägeschnittblöcke werden die übrigen Schritte wie gewohnt vom Chirurgen manuell durch das Setzen von Pins und das Sägen mit oszillierender Handsäge ausgeführt. Eine hohe Präzision der Resektionen konnte bereits am Kadavermodell dargestellt werden,15 klinische Daten sind noch ausständig. Es bleiben Nachteile der konventionellen Technik, wie das Verkippen des Schnittblockes durch die Fixationspins oder ungenaue Sägeschnitte durch Abweichen des Sägeblattes aufgrund mangelnder Technik, sklerotischer Knochen bzw. Weichteiltrauma durch die oszillierende Säge beim Überschreiten der harten Knochenkortikalis. Die Arbeitsschritte bleiben wie gewohnt im Workflow des Chirurgen und die Adaptierung funktioniert schnell.
Das Cori-Robotiksystem ist die Weiterentwicklung von Navio (Smith & Nephew, Memphis, TN, USA) und gilt als moderner Vertreter der bildfreien Robotik. Die Zulassung in den USA erfolgte 2012 für das unikondyläre und patellofemorale Teilgelenk und 2017 für die Knietotalendoprothese. Intraoperativ werden wie in der herkömmlichen Navigation die anatomischen Landmarken abgenommen und mittels Oberflächenmapping wird ein dreidimensionales Modell mit entsprechenden Achsen erstellt. Die Knochenoberflächen der Teilgelenke werden mit einem Handstück und rotierender Kugelfräse in die entsprechende Form gebracht. An der intraoperativen Planung sind virtuelle Sicherheitsgrenzen hinterlegt. Werden diese vom Chirurgen überschritten, zieht das Handstück die Kugelfräse unmittelbar zurück. Für das Navio-System sind längere Fräszeiten beschrieben, als dies für konventionelles Sägen nötig war. Dies dürfte sich mit dem Nachfolger Cori verbessert haben, die Literatur dafür ist noch ausständig. Bei der Knietotalendoprothese werden anhand des erstellten dreidimensionalen Modells und nach Weichteilbalancierung mit dem Handstück die distalen Resektionsflächen gefräst und Verankerungslöcher in Tibia und Femur eingebracht, an denen die konventionellen Schnittblöcke positioniert werden. Die weiteren Schritte werden in der gewohnten Chirurgentechnik und mit den damit verbundenen Nachteilen manuell ausgeführt. Erste prospektive Vergleichsstudien des medialen Teilgelenkes zeigen im Vergleich zum MAKO-System keine Unterschiede im klinischen Outcome und radiologischen Implantatalignment; Operationszeit und Blutverlust fallen beim Marktführer jedoch geringer aus.16Zur Knietotalendoprothese fehlen noch mittelfristige oder Langzeitdaten. Cori wird als portables Endgerät insbesondere für Chirurgen mit häufigen Standortwechseln interessant.
Der OMNIBotic (Corin, Tampa, Fl, USA) ist eine geschlossene Plattform, benötigt keine Bildgebung und wurde 2010 von der FDA für die Knietotalendoprothese zugelassen. Nach der navigationstypischen Registrierung und dem Oberflächenmapping erfolgt die Weichteilbalancierung ähnlich dem Rosa-System. Ein Mini-Roboterarm oder besser gesagt eine motorisierte Sägelehre wird positioniert, im Anschluss erfolgt der händische Sägevorgang. Zusätzlich bietet die Firma einen BalanceBot. Dieser gilt als derzeit einziger digitaler robotikintegrierter Weichteilbalancer. Nach der tibialen Resektion wird der BalanceBot eingebracht und misst die mediale und laterale Weichteilspannunng über den gesamten Bewegungsradius vor der femoralen Resektion. Die gewonnenen Daten helfen bei der femoralen Rotationsausrichtung und optimieren den Streck- und Beugespalt und den Verzicht auf Weichteilrelease.17 Das System konnte in Kadaverstudien präzise Implantatpositionierungen zeigen, ohne die Operationszeit signifikant zu verlängern.18
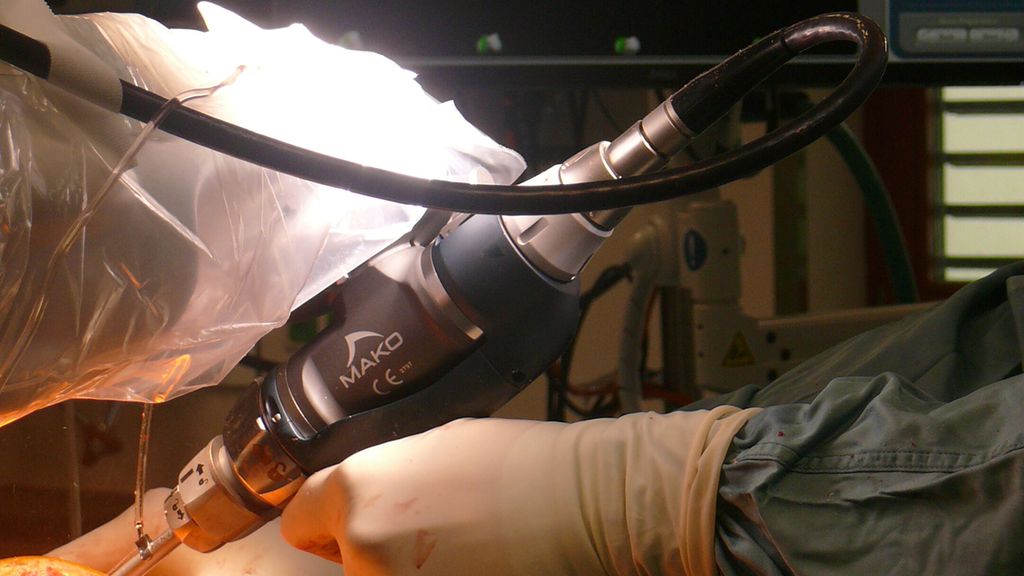
Das geschlossene Mako-System wurde ursprünglich von der Mako Surgical Corporation entwickelt und 2005 eingeführt, jedoch 2013 an die Firma Stryker (Mahwah, NJ, USA) verkauft. Das semiaktive System ist CT-basierend und besteht aus einem Roboterarm mit haptischer Schnittstelle für die Knietotalendoprothese. Nach der Landmarken- und Oberflächenregistrierung werden diese mit dem realen CT-Modell gematcht. Sämtliche Osteophyten an Femur und Tibia werden dargestellt. Das System verlangt einen Produktspezialisten der Firma, der über die gesamte Operation mit dem Chirurgen zusammenarbeitet. Dies wird vor allem in der Einführungsphase auch von der Pflege als Vorteil angesehen. Nach Entfernen der Osteophyten folgt die Implantatpositionierung für einen ausgeglichenen Beuge- und Streckspalt. Die Weichteilbalancierung kann bereits vor den Knochenschnitten simuliert werden. Das 3mm starke Sägeblatt zeigt im sklerotischen Knochen keine Abweichungen9,19 und stoppt unmittelbar, sollte der Chirurg über die virtuellen Sicherheitsgrenzen hinauskommen oder minimal in der Ebene abweichen. Dadurch können das periartikuläre Weichteil und das hintere Kreuzband geschont werden und es kommt zu einem geringeren Blutverlust über die gesamte Operation.1 Bewegungen an der Extremität werden in Echtzeit vom Roboterarm ausgeglichen. Alle Operationsschritte werden digital dokumentiert. Dieses System prägt aktuell mehrheitlich die vorhandene Literatur zur gesamten robotikassistierten Chirurgie, langfristige Daten, insbesondere zu kinematischen Implantationen, sind noch ausständig. Zum aktuellen Zeitpunkt besteht eine FDA-Zulassung für das Teilgelenk medial, lateral und patellofemoral sowie die Knietotalendoprothese und Hüftendoprothese.
Zusammenfassung
Insgesamt steht die Innovation noch in ihren Anfängen und ist nicht aufzuhalten. Der globale Markt für medizinische Roboter ist von 7,24Mrd. USD 2015 auf prognostisch 20 Mrd. USD im Jahr 2023 angestiegen.20 Weitere Firmen wie DepuySynthes des US-Giganten Johnson & Johnson stehen vor dem Markteintritt mit Velys Robotic Assisted Solution und auch das französische Unternehmen Ganymed Robotics kündigt eine baldige Markteinführung eines bildfreien interaktiven Systems an. Entsprechende Publikationen für diese Systeme sind noch ausständig.

Abb. 4: Das Autorenteam arbeitet am Kepler Universitätsklinikum Linz mit dem Makosystem. Der haptische Roboterarm ist mit der Hochfrequenz-Fräse verbunden und gibt exakt Tiefe und Grenzen des knöchernen Fräsvorganges vor. Die Fräse wird aktiv vom Chirurgen geführt. Am Monitor das 3D-Modell, in grün dargestellt die Fläche, die noch abgetragen werden muss
Die Lernkurve des Chirurgen wird in der Literatur allgemein als flach angesehen und mit 7–20 Implantationen konkretisiert.21 In der eigenen Erfahrung ist dies korrekt, sofern das gesetzte Ziel nur eine exakte Größenbestimmung und radiologisch präzise Implantation sind. Die Systeme bieten allerdings deutlich mehr Möglichkeiten und laden ein, sich mit kleinsten Details der Positionierung, der Weichteilbalancierung und dem Patella-Tracking auseinanderzusetzen, die bisher nur von Wenigen theoretisch überlegt, aber nicht visualisiert und objektiviert werden konnten.
Der Wissensanspruch an den Chirurgen ändert sich bezüglich Details der präoperativen Planung und intraoperativen Adaptierung mit der zunehmenden Innovation, während die handwerkliche Reproduzierbarkeit durch ein Assistenzsystem objektiviert und standardisiert werden kann. Der Roboter übernimmt nur die Ausführung, bietet keine intelligente Mehrleistung und verhindert somit nicht die Indikations- oder Planungsfehler des Anwenders.22
In dieser Übersichtsarbeit kann gezeigt werden, dass der Workflow bei allen Robotiksystemen in einer sehr ähnlichen Art abläuft. Der Roboter unterstützt den Chirurgen, seinen individuellen Plan oder auch seine Operationsphilosophie,unter Berücksichtigung von Bandspannung über den gesamten Bewegungsumfang, Implantatgröße, Oberflächenmorphologie und Beinachse exakt auszuführen.
Die Arbeitsgruppe um Fares Haddad zeigte einen geringeren Blutverlust, weniger Schmerzen und geringere periartikuläre Weichteilverletzung. Dennoch müssen diese Ergebnisse auch mit Vorsicht weiter evaluiert werden, da die beschriebenen Fallzahlen meist klein sind, der Nachuntersuchungszeitraum relativ kurz ist und die Autoren in enger Kooperation mit den Herstellern stehen.1,21,23,24
Auch die ersten Ergebnisse aus dem australischen Endoprothesenregister zeigen die geringste Rate an Revisionen für das Teilgelenk nach drei Jahren und somit bereits mit Aufnahme im Register den besten Wert im Vergleich zur konventionellen Vergleichsgruppe.2
Die Kosten dieser Systeme werden von den Anwendern untertrieben, es werden jedoch häufig zusätzliches Supportpersonal und Vertriebsmitarbeiter benötigt. Zusätzlich ist eine hohe Implantationsanzahl pro Jahr notwendig, um die Gesamtkosten tragen zu können. Paradoxerweise werden Robotiksysteme von „highvolume Chirurgen“, die es sich leisten können, nicht verwendet und Chirurgen mit geringem Volumen, die es brauchen würden, können es sich nicht leisten.25
Ausblick
Für die Zukunft besteht Hoffnung, dass die Evolution der neuen Technologien, gepaart mit künstlicher Intelligenz, die Implantation mit der Patientenzufriedenheit so verknüpfen wird, dass ein Algorithmus entwickelt werden kann, der zu besseren Funktionen, längeren Standzeiten und insgesamt höherer Zufriedenheit der Patienten führen wird.26
Literatur:
1 Kayani B et al.: Iatrogenic bone and soft tissue trauma in robotic-arm assisted total knee arthroplasty compared with conventional jig-based total knee arthroplasty: a prospective cohort study and validation of a new classification system. J Arthroplasty 2018; 33(8), 2496–501 2 St Mart JP et al.: The three-year survivorship of robotically assisted versus non-robotically assisted unicompartmental knee arthroplasty. Bone Joint J 2020; 102-B(3), 319-28 3 Bell SW et al.: Improved accuracy of component positioning with robotic-assisted unicompartmental knee arthroplasty: data from a prospective, randomized controlled study. J Bone Joint Surg Am 2016; 98(8), 627-35 4 Insall JN: Presidential address to the knee society. Choices and compromises in total knee arthroplasty. Clin Orthop Relat Res 1988; (226): 43-8 5 Bellemans J et al.: The Chitranjan Ranawat award: is neutral mechanical alignment normal for all patients? The concept of constitutional varus. Clin Orthop Relat Res 2021; 470(1): 45-53 6 Howell SM et al.: Accurate alignment and high function after kinematically aligned TKA performed with generic instruments. Knee Surg Sports Traumatol Arthrosc 2013; 21(10): 2271-80 7Shelton TJ et al.: Do varus or valgus outliers have higher forces in the medial or lateral compartments than those which are in-range after a kinematically aligned total knee arthroplasty? limb and joint line alignment after kinematically aligned total knee arthroplasty. Bone Joint J 2017; 99-B(10), 1319-28 8 Schneider O, Troccaz J: A six-degree-of-freedom passive arm with dynamic constraints (PADyC) for cardiac surgery application: preliminary experiments. Comput Aided Surg 2001; 6(6): 340-51 9 Hampp EL et al.: Less iatrogenic soft-tissue damage utilizing robotic-assisted total knee arthroplasty when compared with a manual approach: a blinded assessment. Bone Joint Res 2019; 8(10): 495-501 10 Schulz AP et al.: Results of total hip replacement using the Robodoc surgical assistant system: clinical outcome and evaluation of complications for 97 procedures. Int J Med Robot 2007; 3(4): 301-6 11 Liow MHL et al.: THINK surgical TSolution-One® (Robodoc) total knee arthroplasty. SICOT J 2017; 3: 63 12 Song EK et al.: Robotic-assisted TKA reduces postoperative alignment outliers and improves gap balance compared to conventional TKA. Clin Orthop Relat Res 2013; 471(1): 118-26 13 Song EK et al: Simultaneous bilateral total knee arthroplasty with robotic and conventional techniques: a prospective, randomized study. Knee Surg Sports Traumatol Arthrosc 2011; 19(7): 1069-76 14 Pailhé R: Total knee arthroplasty: Latest robotics implantation techniques. Orthop Traumatol Surg Res 2021; 107(1S): 102780 15 Parratte S et al.: Accuracy of a new robotically assisted technique for total knee arthroplasty: a cadaveric study. J Arthroplasty 2019; 34(11): 2799-803 16 Leelasestaporn C et al.: Comparison of 1-year outcomes between MAKO versus NAVIO robot-assisted medial UKA: nonrandomized, prospective, comparative study. Knee Surg Relat Res 2020; 32(1): 1-9 17 Shalhoub S et al: Laxity profiles in the native and replaced knee-application to robotic-assisted gap-balancing total knee arthroplasty. J Arthroplasty 2018; 33(9): 3043-8 18 Koulalis D et al.: Adjustable cutting blocks for computer-navigated total knee arthroplasty: a cadaver study. J Arthroplasty 2010; 25(5): 807-11 19 Hampp EL et al.: Robotic-arm assisted total knee arthroplasty demonstrated greater accuracy and precision to plan compared with manual techniques. J Knee Surg 2019; 32(3): 239-50 20 Medical Robotics Market Size, Share, Trend And Forecast To 2022. https://www.credenceresearch.com/report/medical-robotics-market 21 Kayani B et al.: Robotic-arm assisted total knee arthroplasty has a learning curve of seven cases for integration into the surgical workflow but no learning curve effect for accuracy of implant positioning. Knee Surg Sports Traumatol Arthrosc 2019; 27(4): 1132-41 22 Stübig T et al.: Computerassistierte Chirurgie in der Orthopädie und Traumatologie. Dtsch Arztebl Int 2020; 117(47): 793-800 23 Hampp EL et al.: Robotic-arm assisted total knee arthroplasty demonstrated greater accuracy and precision to plan compared with manual techniques. J Knee Surg 2019; 32(3): 239-250 24 Kayani B et al.: Robotic-arm assisted total knee arthroplasty is associated with improved early functional recovery and reduced time to hospital discharge compared with conventional jig-based total knee arthroplasty: a prospective cohort study. Bone Joint J 2018; 100-B(7): 930-37 25 Booth E et al.: Robotics in hip and knee arthroplasty: real innovation or marketing ruse. J Arthroplasty 2019; 34(10): 2197-8 26 Kayani B, Haddad FS: Robotic unicompartmental knee arthroplasty: current challenges and future perspectives. Bone Joint Res 2019; 8(6): 228-31
Das könnte Sie auch interessieren:

Frühe Unterwassertherapie nach totaler Hüft- und Knieendoprothese
Eine frühzeitige Durchführung der Unterwassertherapie mit wasserdichtem Folienverband ab dem vierten postoperativen Tag ist im Allgemeinen sicher, wirksam und ohne Nebenwirkungen.

Aktuelles zur anteromedialen Knieinstabilität
Kombinierte Verletzungen des medialen Kollateral- (MCL) und des vorderen Kreuzbandes (VKB) zählen zu den häufigsten multiligamentären Knieverletzungen. Bei vermeintlich isolierten VKB- ...

Arthroskopische Behandlung von Glenoidrandfrakturen
In der Literatur werden die Begriffe knöcherne Bankart-Läsion und Glenoidrandfraktur häufig synonym verwendet, obwohl sie sich hinsichtlich Pathomechanismus und Therapie deutlich ...