
Die Zukunft der Robotics in der Neurorehabilitation
Sie sind bereits registriert?
Loggen Sie sich mit Ihrem Universimed-Benutzerkonto ein:
Sie sind noch nicht registriert?
Registrieren Sie sich jetzt kostenlos auf universimed.com und erhalten Sie Zugang zu allen Artikeln, bewerten Sie Inhalte und speichern Sie interessante Beiträge in Ihrem persönlichen Bereich
zum späteren Lesen. Ihre Registrierung ist für alle Unversimed-Portale gültig. (inkl. allgemeineplus.at & med-Diplom.at)
In den letzten zwei Jahrzehnten haben sich Roboter, virtuelle Realitätssysteme sowie zuletzt die sogenannten Gehirncomputerschnittstellen (Brain Computer Interfaces) im neurorehabilitativen Konzept etabliert. Grundvoraussetzung für ihren Einsatz ist die Erkenntnis, dass das motorische Lernen auf dem Prinzip des repetitiven Trainings und der neuronalen Plastizität beruht. Auf dieser Grundlage bietet die Robotik zahlreiche ungeahnte Chancen.
Keypoints
-
Der Einsatz von roboterunterstützter Therapie ist aus der Neurorehabilitation nicht mehr wegzudenken.
-
Cobots sollen zukünftig für möglichst viele Bewegungen umfassend eingesetzt werden und als „Therapeutenhelfer“ individuell fungieren.
-
Eine große Chance zur optimalen Nutzung der neuronalen Plastizität ist von der „Brain-Computer Interface“-Technologie zu erwarten.
-
Alle neuen Technologien unterlaufen bis zu deren Einsatz im Routinebetrieb den sogenannten Gartner-Hype-Zyklus: vom Gipfel überzogener Erwartungen bis zur Enttäuschung und über den Pfad der Erleuchtung zu einem Plateau der Produktivität.
Für die Satiriker war vor 200 Jahren in der Ära der Dampfkraft die Illustration der neu geschaffenen Möglichkeit der Fortbewegungen ein großes Thema. Die damals in den Kinderschuhen steckenden Fortbewegungsmittel wurden in Karikaturen durch Darstellung von angetriebenen absurdesten Objekten als humorvolle Themen dargestellt, so etwa in Werken des Künstlers Robert Seymour (1798–1836).
Der Begriff „Roboter“ leitet sich vom tschechischen Wort „robota“ ab und kann mit „Frondienst“ oder „Zwangsarbeit“ übersetztwerden. Mittlerweile hat sich die Bedeutung des Wortes verändert, sodass heute verschiedene Definitionen existieren. Einerseits sind Roboter künstliche Menschen, sogenannte humanoide Androide, andererseits intelligente Maschinen mit menschengemäßen Funktionen, welche häufig eine autonome Arbeitsweise wie Perzeption, Manipulation und Lokomotion durchführen. Zuletzt wird ein Roboter als Interface zwischen Menschen und digitaler bzw. entfernter Welt (Computernetzwerk, Internet) definiert. Einsatzgebiete dieser sogenannten Roboter finden sich in der Industrie und zunehmend im Rahmen der Medizin und in der neurologischen Rehabilitation.
Einsatzgebiete vonroboterassistierten Systemen
Im chirurgischen Bereich wird der Operations-Roboter „Da Vinci“ im operativen Setting eingesetzt. Im Pflegebereich konnten erste Erfolge durch die Entwicklung des Pflegeroboters „Pepper“ erzielt werden, der etwa Fragen von Patienten beantworten kann. Durch spezielle Programmierung soll „Pepper“ in der Interaktion mit Menschen auch deren Emotionen, Mimik oder Stimme erkennen.
Mithilfe anderer Roboter (z.B. Jaco, Kinova) können Patienten mit hoher Querschnittslähmung (Tetraplegie) durch Mundsteuerung einen Roboterarm bewegen und somit mit dem Umfeld in Kontakt treten und bestimmte Tätigkeiten durchführen. In der neurologischen Rehabilitation eröffnet der Einsatz von sogenannten Lokomaten eine neue Ära rehabilitativer Möglichkeiten. Diese Systeme erlauben ein intensives repetitives Gangtraining auch für Patienten mit schweren neurologischen Beeinträchtigungen.
Obwohl dieser Therapieansatz inzwischen etabliert ist, wird nicht selten der vermehrte Einsatz von Trainingsrobotern kontrovers diskutiert und kritisch betrachtet, da eine Ökonomisierung und damit der Ersatz der menschlichen Arbeitskraft befürchtet wird. Diesbezüglich hat bereits Robert Riener, Professor für sensomotorische Systeme an der UZH und der ETH Zürich, Stellung bezogen. Er hält eine Reduktion der Beschäftigung im Gesundheitswesen für unwahrscheinlich, da ansonsten ein optimaler Behandlungserfolg nicht erzielt werden kann. Zudem sind aufgrund der Komplexität der Roboter eine qualifizierte Anleitung und die Bedienung durch speziell geschultes Personal unbedingt notwendig.
Seit ca. zwei Jahrzehnten werden Roboter im neurorehabilitativen Setting auch im Sinne von Exo- und Endoskeletons sowohl für die obere als auch untere Extremität eingesetzt. Durch diesen Therapieansatz konnten in Kombination mit konventioneller Therapie neue Strategien entwickelt werden, die das Outcome in der Neurorehabilitation verbessern. Neue Bewegungsaufgaben können durch den Prozess des sogenannten motorischen Lernens besser erarbeitet werden (Dünnwald, 2009). Laut Dünnwald kommt es bei hinreichender Wiederholungshäufigkeit (repetitives Training) zu Funktionsveränderungen im Bereich ganzer Neuronenverbände und somit zum motorischen Lernen (Haas und Blischke, 2009). In diesem Zusammenhang ist zu beachten, dass bei Nichtgebrauch von bestehenden Nervenzellverbindungen auch ein Verlust dieser Nervenstrukturen eintreten kann (Globas, 2009), wodurch Patienten bereits erlernte Funktionen wieder verlieren.
Für die trainingsinduzierten Wirkmechanismen sind folgende Erkenntnisse von großer Relevanz:
-
Motorisches Lernen funktioniert bei gesunden Personen gleich wie bei Menschen mit neurologischen Defiziten (Majsak, 1996).
-
Motorisches Üben kann durch die sogenannte neuronale Plastizität Veränderungen in den kortikalen Arealen und in den peripheren muskulären Effektoren hervorrufen (Nudo et al., 1996; Green und Wilson, 2000).
-
Größe und Aktivität kortikaler und subkortikaler motorischer Areale sind von der Funktion bzw. dem Gebrauch abhängig (Richards et al., 2008).
Ein von Honda entwickelter humanoider Roboter ist der sogenannte ASIMO (Akronym für Advanced Step in Innovative Mobility). Es handelt sich um einen Robotertyp, der sich auf zwei Beinen bipedal fortbewegen kann und somit dem Menschen im Gangbild ähnlich ist. Er wurde am 20.11.2000 erstmalig vorgestellt. Die Software von ASIMO ist nach dem sogenannten „Top-down“-Ansatz aufgebaut. Dies bedeutet, dass der Roboter keine Lernfähigkeit besitzt und etliche Informationen, die der Roboter benötigt, von Programmierern eingegeben werden müssen, während der „Bottom-up“-Ansatz es dem Roboter ermöglicht zu „lernen“.
Derzeitiger Status …
Es werden verschiedene Phasen der Rehabilitation unterschieden (Abb.1). Dies bedeutet, dass je nach Phase der Therapie spezielle Programme benötigt werden, um den jeweils richtigen rehabilitativen Ansatz zu finden. Wesentlich ist die Erkenntnis, dass ein intensives repetitives Training gemeinsam mit konventionellem Training sowie einem funktionellen Krafttraining mit progressiver Belastung erfolgen sollte. Somit werden entsprechend der Rehabilitationsphase spezielle Programme angewendet. Zusammengefasst sollten in der Rehabilitation initial grobmotorische Funktionen forciert geübt werden. Dies setzt voraus, dass der Fokus der Therapie initial auf elektromechanische Systeme gelegt wird, im weiteren Verlauf werden feinmotorische Defizite beübt.
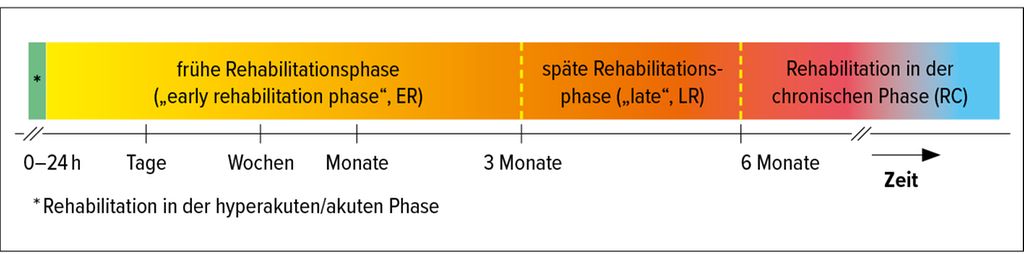
Abb. 1: Phasen der Rehabilitation im zeitlichen Verlauf (modifiziert nach Royal Dutch Society for Physical Therapy [KNGF], 2014)
Prinzipiell ist als Basiskonzept zu unterscheiden, dass es Endeffektor-basierte und Exoskelett-basierte Systeme gibt. Der Vorteil von Endeffektoren ist, dass diese leicht an die Patienten adaptierbar, aber die einzelnen Gelenke nicht kontrollierbar sind. Herausforderungen ergeben sich bei der Extension (Streckung) einer Extremität und bei der Bewegung, vor allem der oberen Extremität, die in ihrer Position nicht vorhersehbar ist. Im Gegensatz dazu haben Exoskeletons völlig kontrollierte Gelenks-achsen, was den Nachteil mit sich bringt, dass die Achsen des Roboters mit den anatomischen Achsen des Patienten übereinstimmen müssen. Dadurch ist vorwiegend bei komplexen Achsen ein Problem gegeben. Auf Basis der Rehabilitationsphasen gibt es diesbezüglich im Bereich der unteren Extremität einen modularen Aufbau (vom Erigo über den Lokomaten bis zum FreeD und bis zum C-Mill) und im Bereich der oberen Extremität aufgrund der Komplexität der Bewegungen einen sequenziellen Aufbau für die obere Extremität.
Im Bereich der Frühmobilisation konnte durch den Einsatz des sogenannten Vemotion-Bettes ein Gap geschlossen werden, indem eine sichere und sehr effiziente Frühmobilisierung bei sogenannten B-Phase- oder Intensivpatienten etabliert wurde. Die Patienten können im eigenen Bett bleiben und müssen nicht auf separate Geräte umgelagert werden. Dadurch kann den negativen Folgen der Immobilität präventiv entgegengewirkt werden. Das bedeutet eine Verbesserung bzw. den Erhalt der Skelett- und Atemmuskelfunktion, eine Steigerung der hämodynamischen Reagibilität, eine Verbesserung der zentralen und peripheren Perfusion und des Muskelstoffwechsels. Zudem ist eine Steigerung der kognitiven Kompetenz und des psychischen Wohlbefindens zu beobachten.
… und zukünftige Entwicklungen in der Robotik
Künftig werden sogenannte „Cobots“ zum Einsatz kommen. Diese Roboter können feinste Bewegungen durchführen, Widerstände sofort messen und selbstregulativ steuern und sind somit für den Einsatz im klinischen Alltag geeignet. Zielsetzung im Bereich der Neurorehabilitation ist, dass derartige Roboter zu „Therapeutenhelfern“ werden, die für möglichst viele Bewegungen im Bereich untere und obere Extremitäten umfassend eingesetzt werden können. Dieses Konzept wurde an Strokepatienten untersucht, wobei mithilfe von elektrophysiologischen Methoden (EMG) die beabsichtigte Bewegung detektiert und mit funktioneller Elektrostimulation umgesetzt wurde (Ulrich, 2019).
Ein weiterer wichtiger Fokus in der Entwicklung der Robotik liegt im Bereich der sogenannten „Light weight“-Exoskeletons. Diese werden vorwiegend bei querschnittsgelähmten Patienten, aber auch Patienten mit generalisierter Muskelschwäche oder auch Post-Stroke-Patienten angewendet. Voraussetzung für diese Therapie ist z.B. beim sogenannten Myosuit, dass eine gewisse Restfunktion der Muskulatur vorhanden ist. Vordergründiges Ziel ist, die Patienten im Innenbereich für einige Schritte mobil zu machen oder in vertikaler Position an Alltagsaktivitäten teilnehmen lassen zu können. Dies bedeutet nach unserer Erfahrung eine deutliche Verbesserung der Motivation und damit korrelierend der Stimmung der Patienten.
Ein interessantes zukünftiges Einsatzgebiet wird die Anwendung sogenannter „Brain-Computer Interface“-Systeme sein, die sich allerdings erst in der Entwicklung befinden. Diesbezüglich nimmt unsere Abteilung an einer geplanten randomisierten, doppelverblindeten, kontrollierten multizentrischen Studie teil. Ziel ist es, die neuronale Plastizität, und damit die Fähigkeit derUmgestaltung von Nervenzellverbänden, bei Schlaganfallpatienten nachzuweisen. Unter Zuhilfenahme einer durch die Gehirn-Computer-Schnittstelle (Brain-Computer Interface) gesteuerte funktionelle Elektrostimulation inklusive Handorthese soll dies idealerweise zu einer Aktivierung einer funktionell relevanten kortikalen Reorganisation führen. Das Positive ist, dass hierbei eine optimale Nutzung der sogenannten neuronalen Plastizität bewirkt werden kann. Dies ist möglich, weil die Absicht, z.B. einen Gegenstand zu greifen, und die Aktion, den Gegenstand dann tatsächlich zu greifen, durch die Wahrnehmungsschleife, dass nach dem Gegenstand gegriffen wird, ergänzt werden (Abb.2).
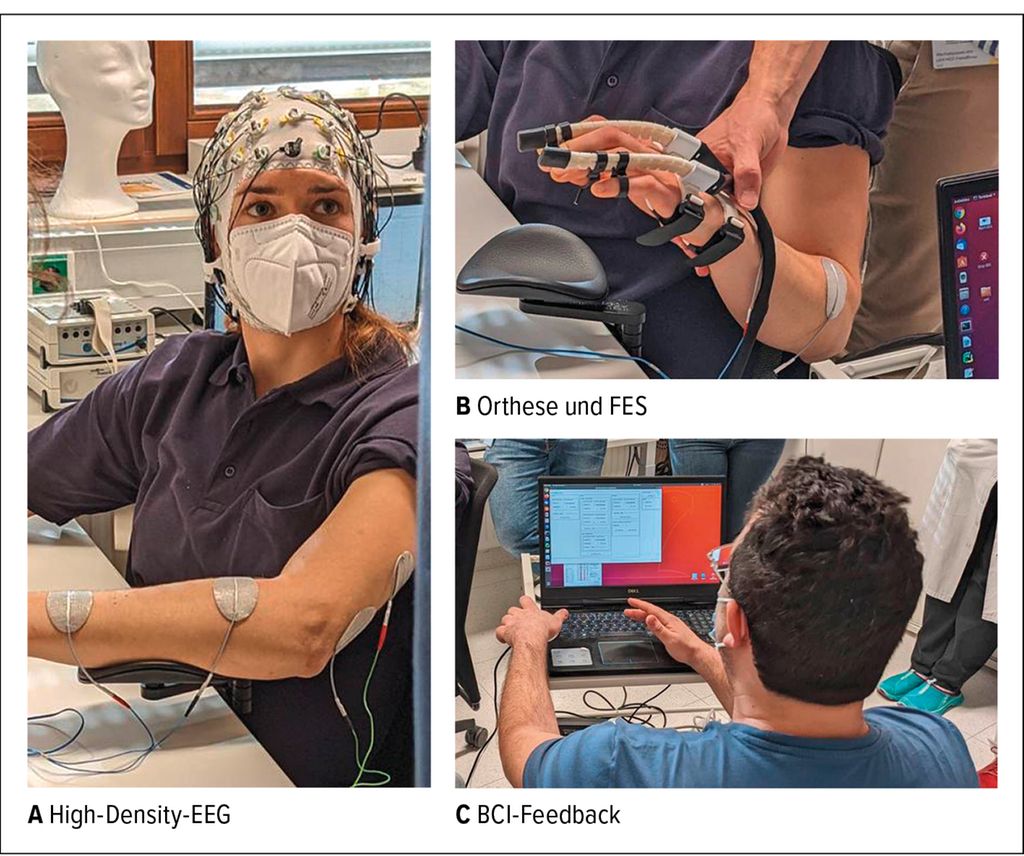
Abb. 2
Zusammengefasst gilt es insbesondere auch bei schwer betroffenen Patienten, in Ergänzung zu konventionellen neurorehabilitativen Maßnahmen, sehr früh eine Vertikalisation und ein Gangtraining zu initiieren. In Studien konnte nachgewiesen werden, dass ein frühzeitiges Starten des Trainings eine raschere Remission und damit bestenfalls eine Erholung des Gangbildes bewirken kann. Aufgrund der komplexen Bewegungsmuster wird die roboterunterstützte Behandlung der oberen Extremität eine große Herausforderung bleiben. Hier gilt es in den jeweiligen Phasen der Rehabilitation sehr spezifisch roboterunterstütztes Training anzubieten und gegebenenfalls mit Virtual-Reality-Systemen zu ergänzen.
Literatur:
bei der Verfasserin
Das könnte Sie auch interessieren:

Pharmakologische und neuromodulatorische Behandlungen des Clusterkopfschmerzes
Die Behandlung des chronischen Clusterkopfschmerzes steht noch heute vor großen Herausforderungen. Am 19. European Headache Congress (EHC) 2025 präsentierte Dr. Anja Petersen, ...

Ist die ketogene Diät eine Präzisionsmedizin?
Die ketogenen Ernährungstherapien sind etablierte Behandlungsformen bei Epilepsie. Während sie primär bei therapierefraktären pädiatrischen Epilepsien eingesetzt werden, finden sie ...

Neues aus der Alzheimer’s Disease Drug Development Pipeline
Mit der weltweiten Zulassung der Amyloidantikörper Lecanemab und Donanemab ist erstmals eine kausale Behandlung der Alzheimerkrankheit möglich geworden. Die Behandlung setzt an der ...