
Der Stellenwert der Navigation in der Wirbelsäulenchirurgie
Sie sind bereits registriert?
Loggen Sie sich mit Ihrem Universimed-Benutzerkonto ein:
Sie sind noch nicht registriert?
Registrieren Sie sich jetzt kostenlos auf universimed.com und erhalten Sie Zugang zu allen Artikeln, bewerten Sie Inhalte und speichern Sie interessante Beiträge in Ihrem persönlichen Bereich
zum späteren Lesen. Ihre Registrierung ist für alle Unversimed-Portale gültig. (inkl. allgemeineplus.at & med-Diplom.at)
Die spinale Navigation findet zunehmende Verbreitung und ermöglicht teilweise neue Trends und Errungenschaften in der Wirbelsäulen-chirurgie. Dieser Artikel soll daher einen kompakten Überblick über Grundlagen, Vor- und Nachteile sowie relevante Anwendungsgebiete der Navigation in der Wirbelsäulenchirurgie geben.
Keypoints
-
Die navigierte Implantation von Pedikelschrauben zeigt bessere radiologische und klinische Ergebnisse verglichen mit konventionellen Methoden.
-
Bei anatomisch komplexen Situationen bietet die Navigation zusätzliche Orientierung und Sicherheit und kann vielfältig eingesetzt werden.
-
Navigation ermöglicht eine Reduktion der Strahlenbelastung für das OP-Personal.
Navigation in der spinalen Chirurgie wird seit ihrer klinischen Einführung in den 1990er-Jahren zunehmend verbreitet eingesetzt. Hauptargument für die Entwicklung und den Einsatz der Navigation ist die komplexe Anatomie der Wirbelsäule: die Nähe zu kritischen Strukturen wie großen Gefäßen, Nerven und Rückenmark, kombiniert mit einer häufig notwendigen Implantatversorgung. Kritische Argumente gegen die Navigation umfassen hohe Anschaffungskosten (je nach System mehrere 100000 €), eine komplexere Bedienung mit zusätzlicher Operationszeit sowie eine Abhängigkeit von funktionierender Hard- und Software.1 Dem gegenüber stehen die Vorteile einer hohen Präzision und einer deutlich geringeren Strahlenexposition für das OP-Personal. In den vergangenen Jahren ermöglichten technische Fortschritte nicht nur Optimierungen bestehender Operationstechniken, sondern führten auch zur Entwicklung neuer Ansätze und Trends, wie beispielsweise dem zunehmenden Einsatz zervikaler Pedikelschrauben.
Technische Grundprinzipien

Abb. 3: Intraoperatives Set-up für navigierte dorsale HWS-Zugänge. Die Infrarotkamera und der Instrumententisch sind am Kopfende positioniert. Das intraoperative CT (O-Arm) ist steril am kaudalen Ende des OP-Situs positioniert. Im Zugangsbereich sichtbar ist die Referenzklemme mit den Infrarotmarkern („Stern“), die am Dornfortsatz fixiert wurde
Spinale Navigation basiert auf der Kombination bildgebender Verfahren mit Echtzeit-Tracking, um Implantate hochpräzise zu platzieren. Zunächst werden präoperative CT- oder intraoperative 3D-Aufnahmen erstellt, die als anatomische Referenz dienen. Anschließend erfolgt die Registrierung, also die geometrische Zuordnung (Tracking) dieser Bilddaten zur realen Patientenanatomie. Dafür kommen üblicherweise intraoperativ optische Verfahren (z.B. Infrarotkameras und Infrarotmarker; siehe beispielsweise in Abb. 3 oder 12) oder Oberflächenreferenzierung zum Einsatz. Die Bild- und Trackingdaten werden durch spezielle Algorithmen fusioniert und in einer 3D-Darstellung visualisiert. Die Genauigkeit hängt wesentlich von Bildqualität, Registrierungsverfahren und Systemkalibrierung ab, weshalb eine kontinuierliche intraoperative Validierung der Genauigkeit an anatomischen Landmarken notwendig ist.1–4
Implantation von Pedikelschrauben
Bei der Implantation von Pedikelschrauben handelt es sich um den verbreitetsten Einsatz der Navigation in der Wirbelsäulenchirurgie. Es existieren unterschiedliche navigationsgestützte Techniken zur Implantation von Pedikelschrauben. So kann etwa eine Jamshidi-Nadel navigiert eingesetzt und anschließend können über Führungsdrähte die Schrauben eingebracht werden. Alternativ lässt sich der Schraubendreher selbst navigieren, wobei die geplante Schraubenlage im System visualisiert wird. Eine weitere Möglichkeit besteht im Vorbohren der Schraubenkanäle mittels navigierter Hochgeschwindigkeitsfräse. Je nach Hersteller und verwendetem Navigationssystem stehen somit verschiedenste Workflow-Varianten zur Verfügung. In zahlreichen Studien konnten eine höhere Genauigkeit und Sicherheit der Navigation im Vergleich zu konventionellen Methoden wie Freihandtechnik oder Durchleuchtung gezeigt werden. Eine Metaanalyse mit 14 Studien, 1723 Patient:innen und 9019 Pedikelschrauben zeigte eine signifikant geringere Fehlplatzierungsrate bei computergestützter Navigation (relatives Risiko 0,33) verglichen mit Fluoroskopie. Gleichzeitig wurden eine geringere intraoperative Blutungs- und Komplikationsrate dokumentiert, obwohl die Operationszeit mit Navigation im Durchschnitt länger war.5 Eine weitere große Metaanalyse über 24000 Schrauben fand heraus, dass 96,2% der Schrauben in der Navigationsgruppe klinisch akzeptabel platziert wurden – gegenüber 94,2% der konventionellen Methoden. Vor allem waren postoperative Revisionen und Komplikationen in der Navigationsgruppe signifikant reduziert.6 Auch eine systematische Übersicht über die zervikale Pedikelschraubenplatzierung dokumentierte signifikant niedrigere Fehlplatzierungsraten (12,5% vs. 18,8%) und komplikationsbedingte neurovaskuläre Schäden (0,3% vs. 1,9%) mit Navigation gegenüber Durchleuchtung.7 Gewisse Techniken, wie z.B. zervikale Pedikelschrauben, haben erst durch die Navigation einen entsprechenden Aufschwung erfahren. So implantieren wir beispielsweise an unserer Klinik seit 5 Jahren standardmäßig zum Großteil (subaxiale) zervikale Pedikelschrauben. Deren Vorteil ist der deutlich stärkere Halt der Schrauben, mit einer bis zu vierfach höheren „pull-out strength“ im Vergleich zu Massa-lateralis-Schrauben.8 Kleine Pedikel, die Nähe zur A. vertebralis und zur Nervenwurzel bzw. zum Myelon und die auch intraoperativ mobile HWS erschweren hingegen die Implantation. Auch bei routinemäßigem Einsatz kam es bisher bei mehr als 1100 implantierten zervikalen Schrauben zu keinem einzigen Fall einer Vertebralisverletzung oder einer schraubenassoziierten Verletzung von Spinalnerv oder Rückenmark. Auch postoperative Revisionen aufgrund einer Schraubenfehllage waren nicht notwendig.9
Fallbeispiel 1
Beispiel für die Implantation zervikaler Pedikelschrauben. In diesem Fall kam es bei einem 61-jährigen Patienten 10 Jahre nach anteriorer zervikaler Diskektomie und Fusion (ACDF) C4/5 und ventraler Verplattung C4–6 zu einer Ankylosierung auch von C6/7. Nach Sturz kam es zu einer Fraktur bei C6/7 mit begleitender Bogenfraktur und auch Beteiligung der dorsalen Ligamenta (Abb. 1 und 2). Klinisch bestanden ausgeprägte Nackenschmerzen und kein neurologisches Defizit. Es wurde die Indikation der dorsalen Verschraubung von C4 auf Th1 gestellt. Intraoperativ wurde routinemäßig zusätzlich eine kleine Referenzschraube in einer Lamina – entfernt von der Dornfortsatz-Referenzklemme für die Navigation – gesetzt. Mit dieser konnte intraoperativ die Genauigkeit der Navigation exakt überprüft werden (Abb. 4 und 5). Mittels navigierter High-Speed-Fräse wurden die Schraubenkanäle vorgebohrt (Abb. 6), im Anschluss wurde der Bohrkanal ausgetastet und die Schrauben wurden implantiert. Abbildung 7 zeigt eine Röntgenkontrolle 3 Monate postoperativ.

Abb. 1: Sagittales Knochenfenster-CT der HWS. Distal einer Verplattung C4-6, mit auch bereits stattgefundener Ankylosierung C6/7, kam es zu einer instabilen Anschlussfraktur bei C6/7 mit Bogenfraktur |
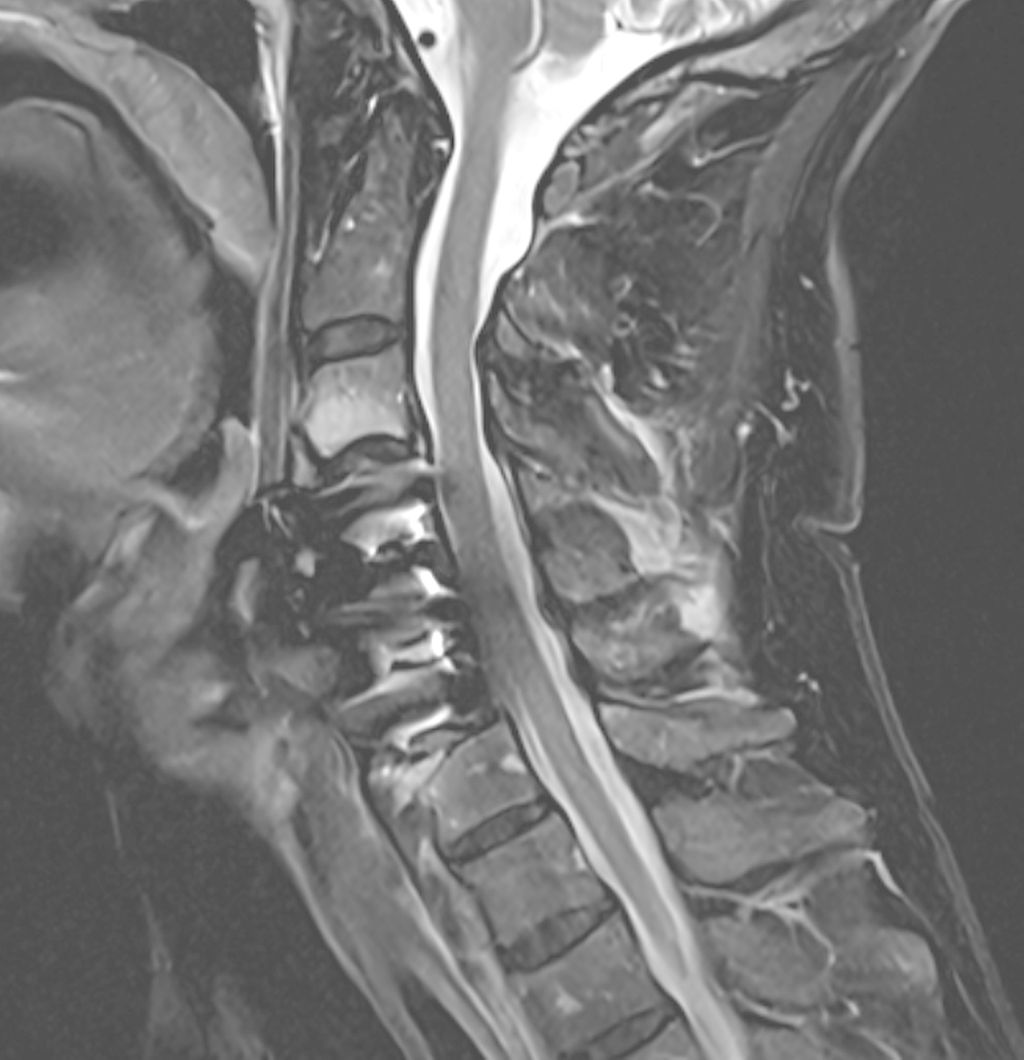
Abb. 2: Sagittales MR (STIR) der HWS. Neben dem Ödem im Bereich der Fraktur bei C6/7 zeigen sich auch Hinweise auf eine Verletzung der dorsalen Band-strukturen |
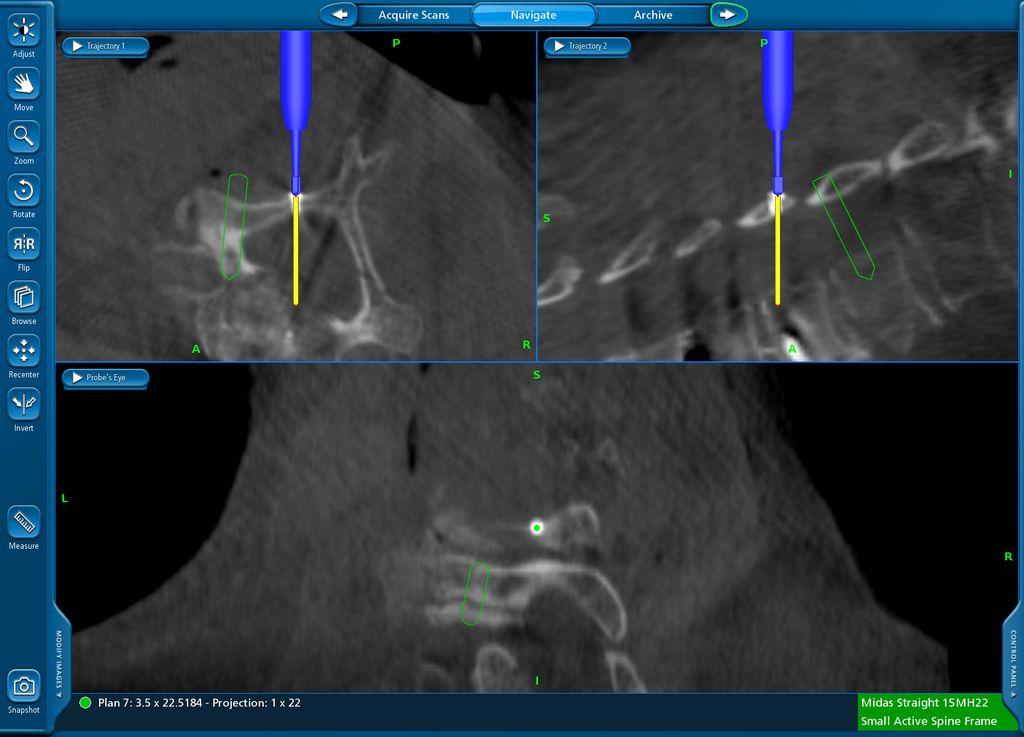
Abb. 4: Screenshot der Navigationssoftware intraoperativ (Stealth Station S7). Es erfolgt die intraoperative Verifizierung der Navigationsgenauigkeit mittels kleiner Schraube in der Lamina, positioniert idealerweise entfernt von der Dornfortsatz-Referenzklemme. Die navigierte Fräse wird im Situs exakt auf die Schraubenmitte gerichtet, und die Navigation bestätigt die Genauigkeit |
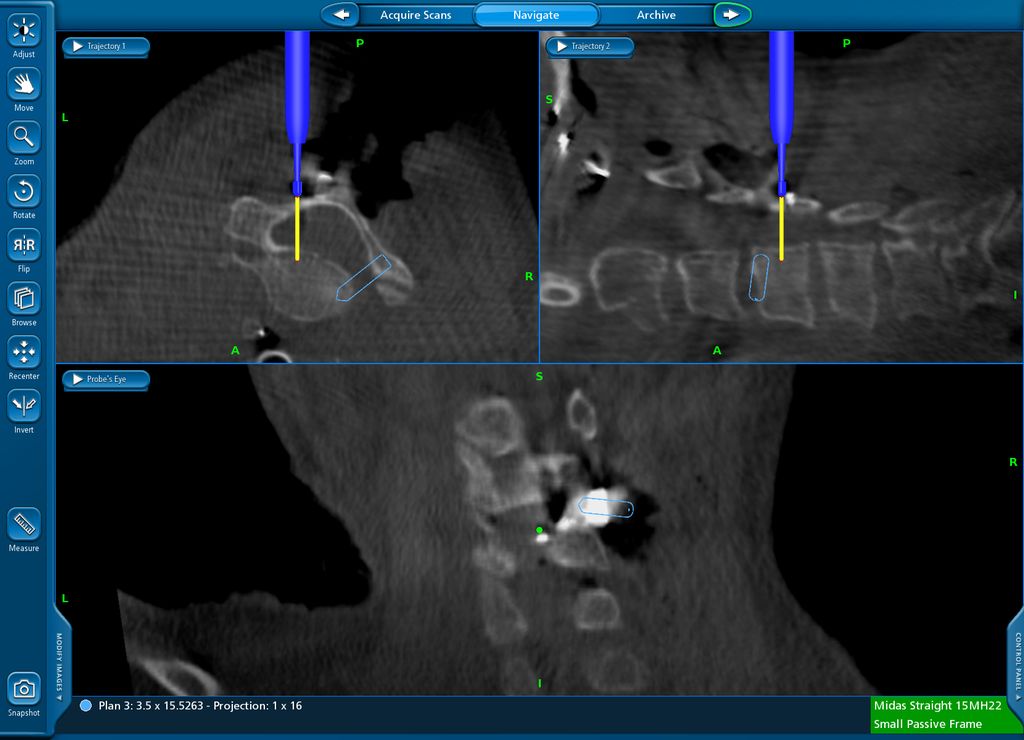
Abb. 5: Screenshot der Navigationssoftware intraoperativ (Stealth Station S7). In diesem Fall wurde ebenfalls die Fräse im Situs direkt auf die Schraube gerichtet, die Navigationssoftware zeigt aber eine diskrete Abweichung insbesondere in der sagittalen Achse |
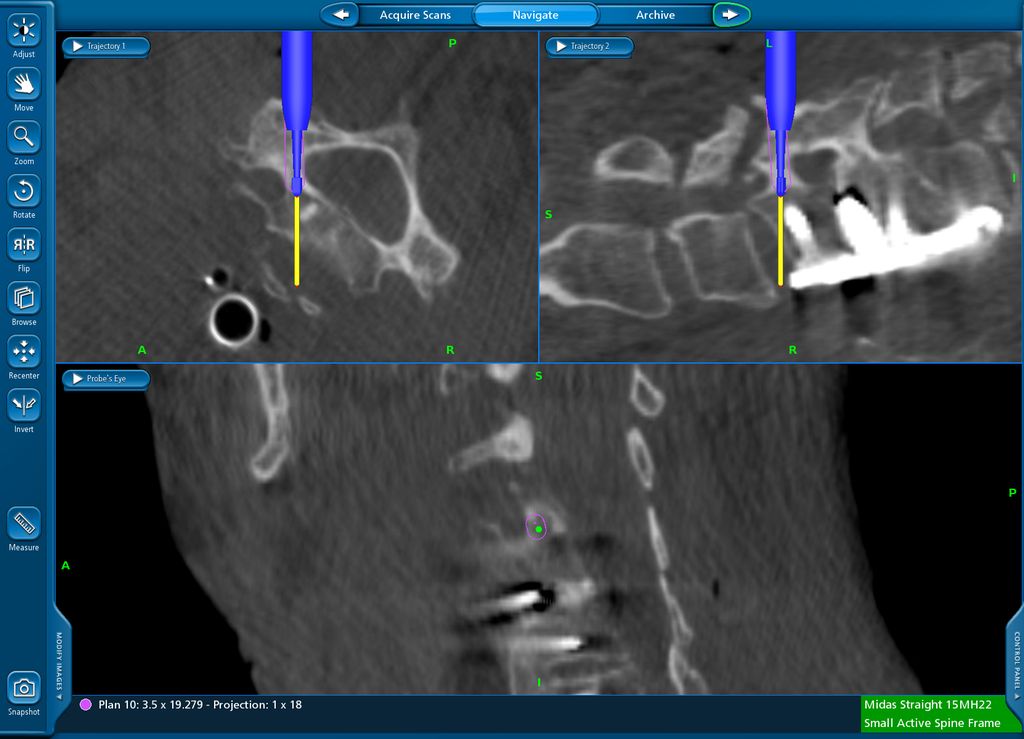
Abb. 6: Vorgang bei der navigierten Schraubenkanalbohrung |
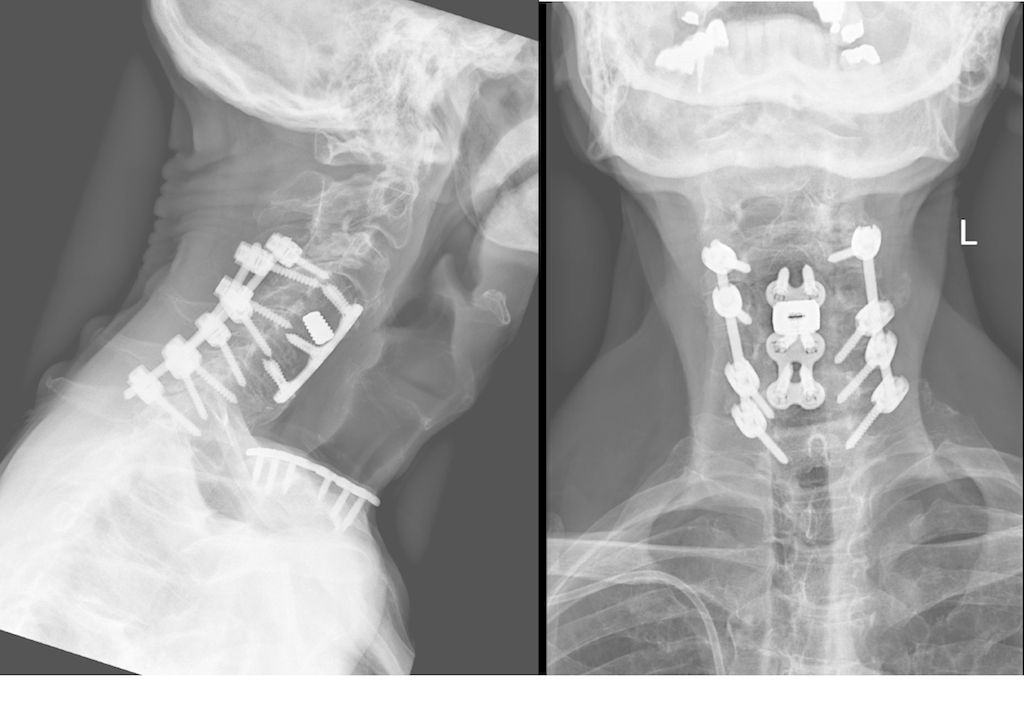
Abb. 7: Postoperatives Röntgen nach dorsaler Instrumentierung C4 auf Th1 |
Lumbale Pedikelschrauben in „cortical bone trajectory“ sind eine weitere gute Einsatzmöglichkeit für die Navigation. Im Gegensatz zu konventionellen Pedikelschrauben haben diese Schrauben ihren „entry point“ medial und kaudal am Pedikel, der Zielpunkt liegt lateral und kranial im Wirbelkörper. Ein wesentlicher Vorteil dieser Schraubentrajektorie besteht – neben der verbesserten Verankerung, insbesondere bei osteoporotischem Knochen – darin, dass der mittelliniennahe Eintrittspunkt nur ein sehr begrenztes Abpräparieren der autochthonen Rückenmuskulatur erfordert und der Hautschnitt klein gehalten werden kann.10,11 Da die Trajektorie dieser Schrauben herausfordernd ist, wurde diese Schraubentrajektorie hauptsächlich für den Einsatz kombiniert mit Robotik vorgeschlagen, ist jedoch auch mittels Navigation gut umsetzbar.
Fallbeispiel 2
TLIF über Mittellinienzugang mit Schrauben in „cortical bone trajectory“. Bei der 63-jährigen Patientin bestand eine degenerative Spondylolisthese Meyerding Grad I mit Facettengelenkszysten und Wirbelkanalstenose (Abb. 8). Klinisch bestanden Lumboischialgien mit Ausstrahlung dem Dermatom L5 bds. entsprechend. Es wurde ein Mittellinienzugang durchgeführt und zuerst wurden navigierte Schrauben in „cortical bone trajectory“ platziert (Abb. 9). Anschließend erfolgten eine Facettektomie L4/5 links und eine Dekompression des Wirbelkanals. Abbildung 10 zeigt, dass der Hautschnitt aufgrund der mittelliniennahen Schraubenköpfe klein gehalten werden kann. Klinisch wurden die lumbalen Schmerzen wie ausstrahlende Beschwerden 1 Jahr postoperativ annähernd vollständig behoben, die korrespondierende Röntgenkontrolle ist in Abbildung 11 dargestellt.
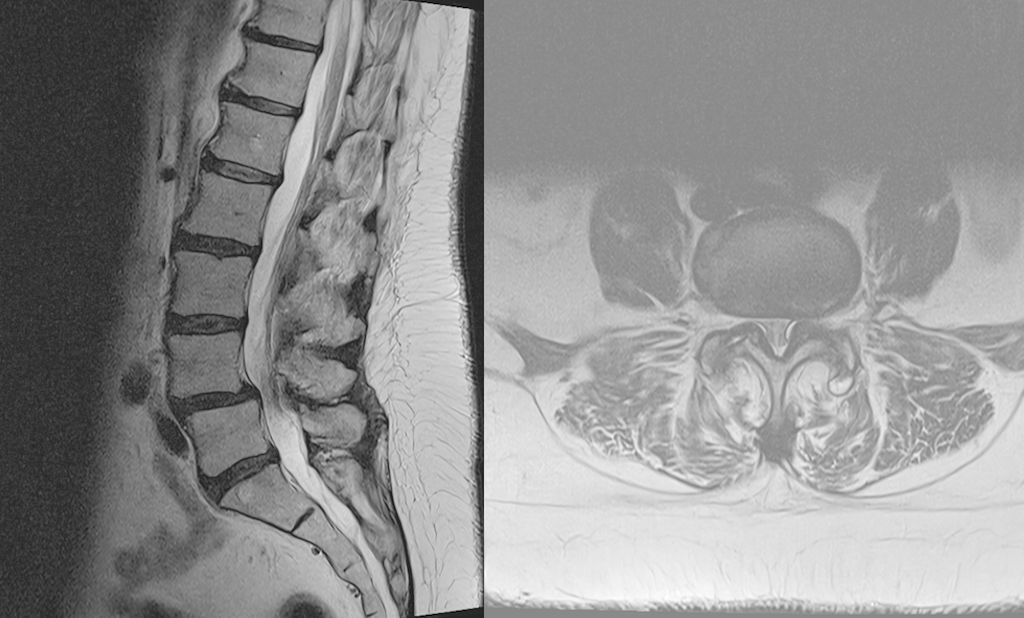
Abb. 8: Präoperatives sagittales und axiales MR (T2) mit degenerativer Spondylolisthese Meyerding Grad 1, Wirbelkanalstenose und bilateralen Facettengelenkszysten |
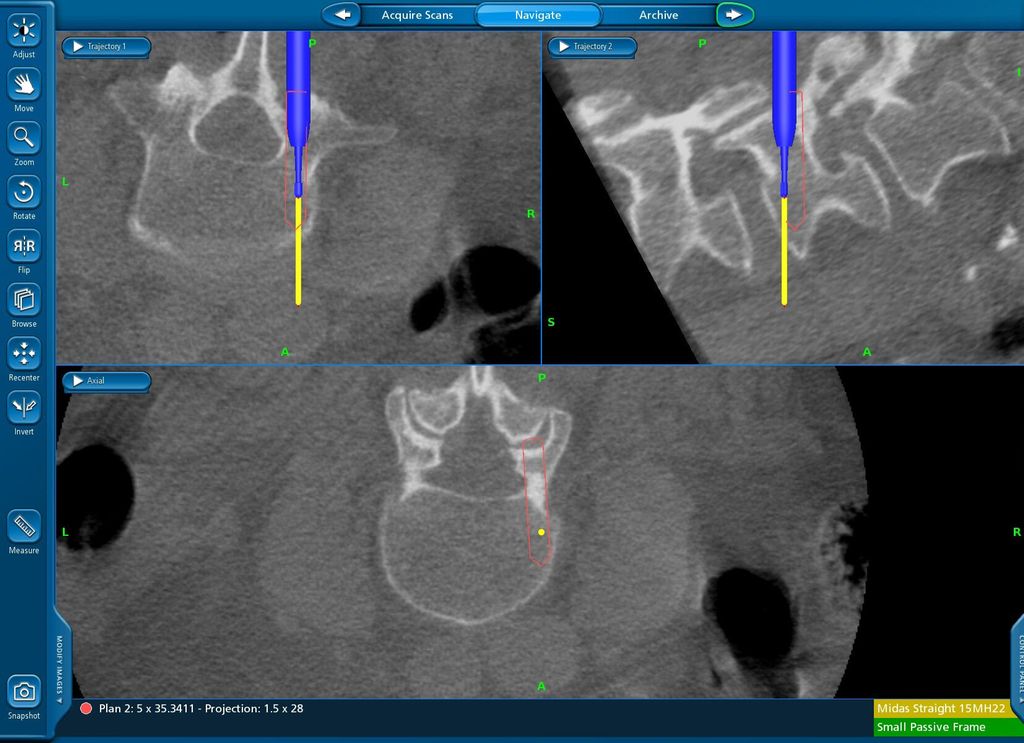
Abb. 9: Navigierter Bohrvorgang für eine lumbale Pedikelschraube in „cortical bone trajectory“ |
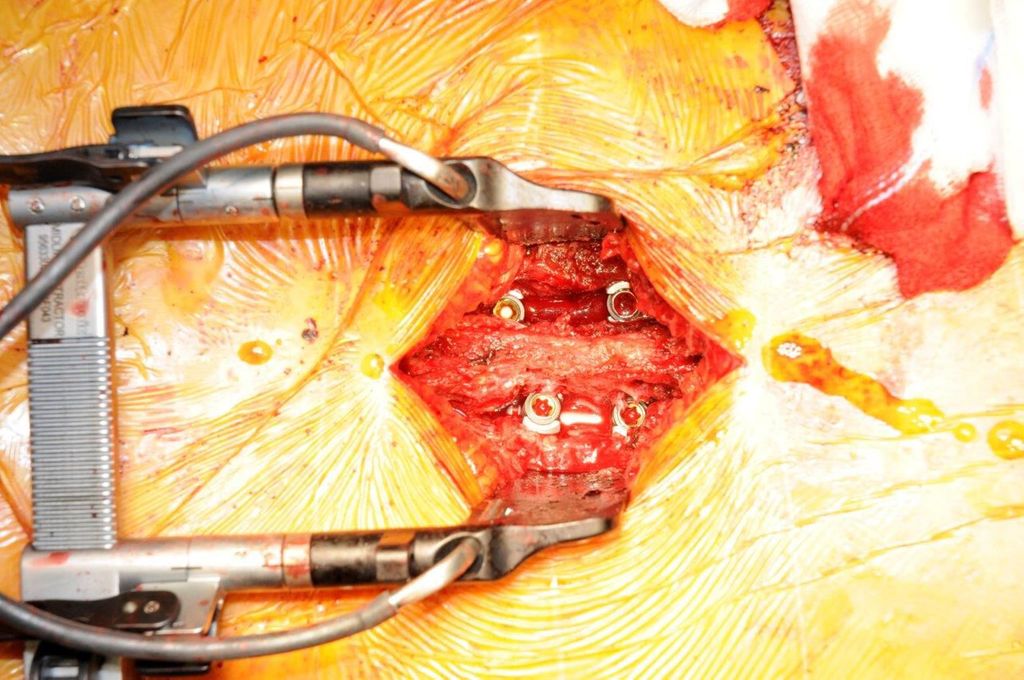
Abb. 10: Intraoperativer Situs nach Implantation der Schrauben in „cortical bone trajectory“ L4/5 und erfolgter Facettektomie L4/5 links |
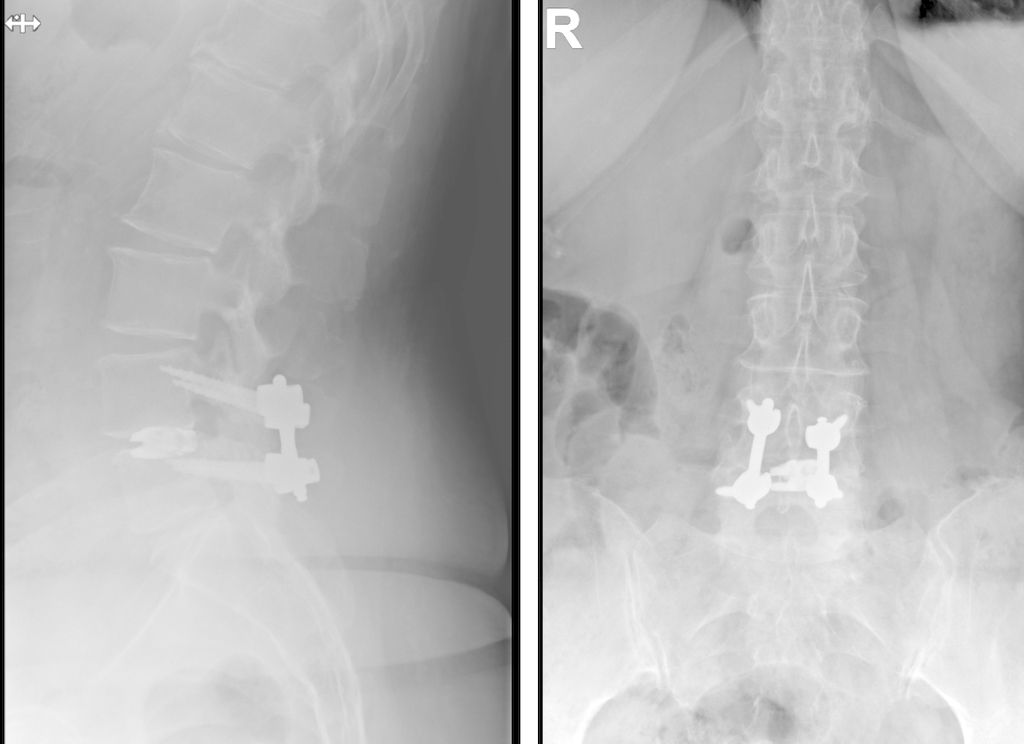
Abb. 11: Postoperatives Röntgen nach Fusion L4/5 über Pedikelschrauben in „cortical bone trajectory“ und TLIF-Implantation von links. Die Spondylolisthese zeigt sich postoperativ aufgehoben |
Implantation von „interbody cages“
Vorteil der Navigation bei der Implantation von „interbody cages“ ist, dass von Höhenlokalisierung über Diskus- und Endplattenpräparation bis zur konkreten Cage-Implantation alle OP-Schritte mit den entsprechenden Instrumenten navigiert werden können. So können zahlreiche intraoperative Röntgenkontrollen vermieden werden. Zudem können die ideale Implantatgröße und auch die Trajektorie des Einsetzinstruments anhand der intraoperativen Gegebenheiten auf dem Navigationssystem überprüft werden. Studien, die den Vergleich zwischen durchleuchtungskontrollierter und navigationsgestützter „Interbody cage“-Platzierung untersuchen, zeigen, dass Navigationsverfahren in der Regel genauer sind. So berichtete eine Studie eine Genauigkeitsrate der Cage-Platzierung von über 94% mit Navigation, verglichen mit geringfügig niedrigeren Raten bei Fluoroskopie.12 In einer anderen Untersuchung lag die Präzision der navigierten Cage-Positionierung bei rund 99%, während Workflows mit Durchleuchtung meist eine etwas geringere Genauigkeit hatten.13 Neben der erhöhten Genauigkeit senkt die Navigation auch die Strahlenbelastung für Patient:innen und Personal deutlich. Die bis dato größte publizierte Studie zum Thema hat bei 214 Patienten mit 350 „interbodycages“ nur einen Fall einer revisionsbedürftigen Cage-Position gefunden (0,47%). Konkrete Prozentangaben variieren je nach Studie, doch zeigt die Tendenz, dass die Navigation eine höhere Genauigkeit bieten kann und sich insbesondere für minimalinvasive Techniken anbietet. Metaanalysen sind jedoch notwendig, um eine eindeutige quantitative Bewertung zu ermöglichen.14
Fallbeispiel 3
Navigierte Implantation eines „interbody device“ über lateralen Zugang (XLIF; „Xtreme lateral interbody fusion“). Bei der 79-jährigen Patienten kam es nach Fusion L4/5 vor mehr als 10 Jahren zu einer symptomatischen Anschlusssegmentdegeneration L3/4 mit Schmerzen im Dermatom L4 beidseits sowie zu Lumbago. Es erfolgte navigiert die Implantation eines Zugangs in Rechtsseitenlage. Intraoperativ wurde die Referenz am Beckenkamm platziert (Abb. 12) und mit intraoperativem CT (O-Arm) ein 3D-Datensatz gewonnen. Anhand dessen können Instrumente wie Küretten oder Raspatorium (Abb. 13) wie auch die Implantation des Cages selbst (Abb. 14) navigiert werden. Das postoperative Röntgen zeigt einen regelrechten Implantatsitz (Abb. 15).

Abb. 12: Vorgang bei der navigierten CageImplantation. Patientin in Rechtsseitenlage positioniert. Der Referenzstern für die optische Navigation wurde am Beckenkamm angebracht |
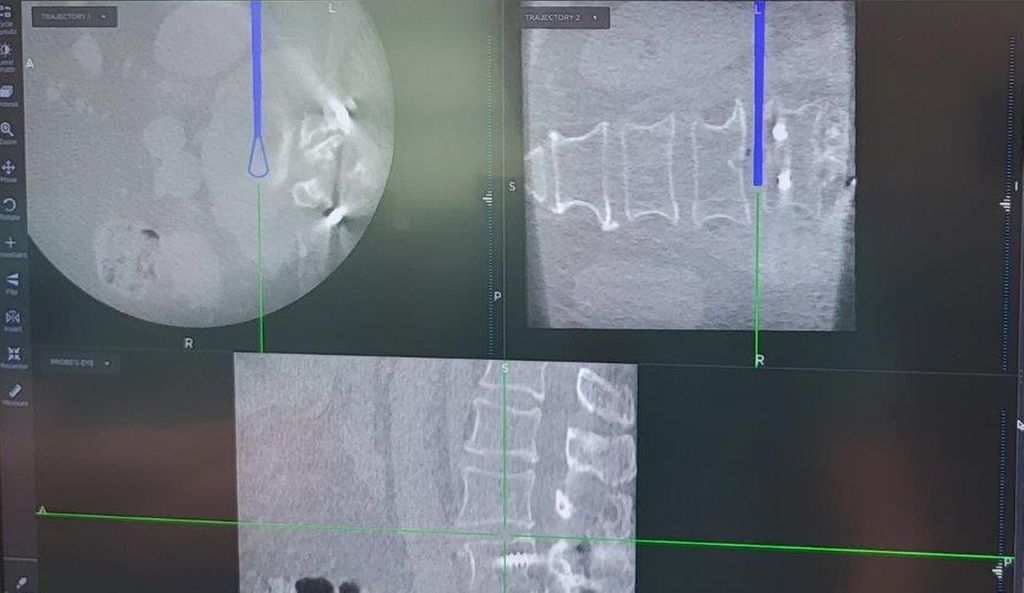
Abb. 13: Navigiertes Ausräumen und Anfrischen des Bandscheibenfachs |
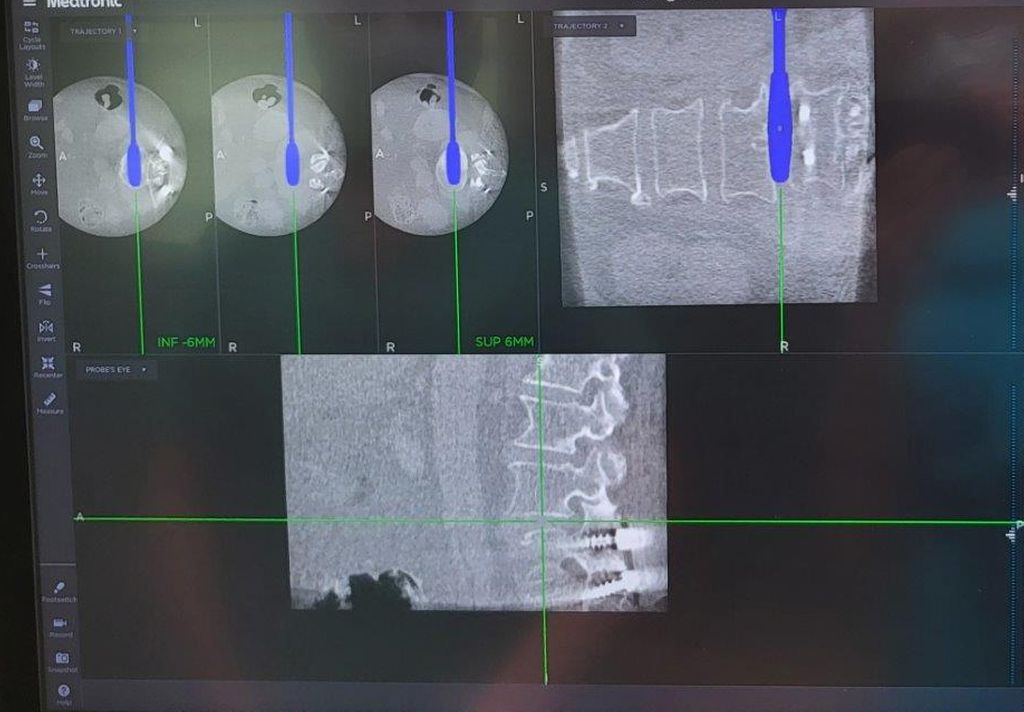
Abb. 14: Navigierte Implantation des Cages |
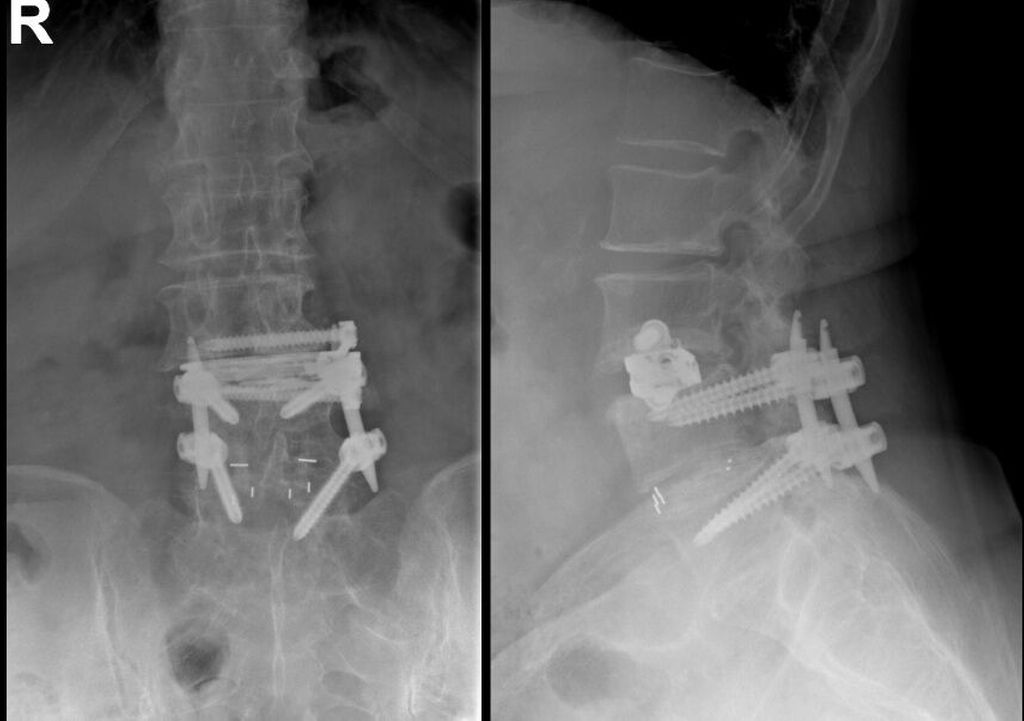
Abb. 15: Postoperative Röntgenkontrolle nach XLIF L3/4 bei Anschlussdegeneration nach Fusion L4/5 |
Intraoperative 3D-Visualisierung
Die Navigation stellt nicht nur beim Einbringen von Implantaten eine Hilfe dar, sondern kann auch in anatomisch herausfordernden Situationen rein zur Verbesserung der Orientierung zu Hilfe genommen werden. Mögliche Anwendungsfelder stellen hier beispielsweise die untere HWS oder der zervikothorakale Übergang dar, welche im konventionellen Röntgen teilweise schwer darstellbar sind. Abbildung 16 zeigt den MR-Befund einer 32-jährigen Patientin, die auswärtig zur ACDF C6/7 indiziert wurde, wobei der Eingriff dort aber aufgrund der Unmöglichkeit, die HWS unter Durchleuchtung entsprechend einzustellen, nicht erfolgte. Abbildung 17 zeigt das intraoperative Röntgen mit bereits kräftigem Schulterzug, in dem aber nur mehr das Segment C4/5 sicher beurteilt werden kann. In diesem Fall erfolgte mittels O-Arm der Eingriff navigiert. Ein anderes Beispiel ist die Anwendung zur Orientierung bei Osteotomien, wo die Navigation an unserer Klinik ebenfalls standardmäßig angewendet wird. Abbildung 18 zeigt einen intraoperativen Screenshot im Rahmen der Navigationsanwendung bei einer thorakalen Corporektomie (Th12) von dorsal im Rahmen einer Tumorresektion. Auch bei verkalkten Bandscheibenvorfällen, wie in Abbildung 19 dargestellt, kann die Navigation zur besseren intraoperativen Orientierung herangezogen werden. Ein weiteres Beispiel der vielfältigen Anwendungsmöglichkeiten der Navigation zeigt Abbildung 20. In diesem Fall wurde im Rahmen einer C1/2-Verschraubung nach Harms das Gelenk C1/2 beidseits navigiert zur besseren Fusion angefrischt.

Abb. 16: Sagittales MR (T2) einer 32-jährigen Patienten mit Diskusprolaps bei C6/7. Klinisch bestanden korrespondierend Schmerzen im Dermatom C7 rechts |

Abb. 17: Intraoperatives Röntgen der Patientin aus Abbildung 16. Das letzte einsehbare Segment im seitlichen Strahlengang ist C4/5 |

Abb. 18: Anwendung der Navigation zur anatomischen Orientierung (Spitze des Instruments = grüner Punkt) im Rahmen einer Corporektomie Th12 von dorsal bei Tumor Th12 mit pathologischer Fraktur |
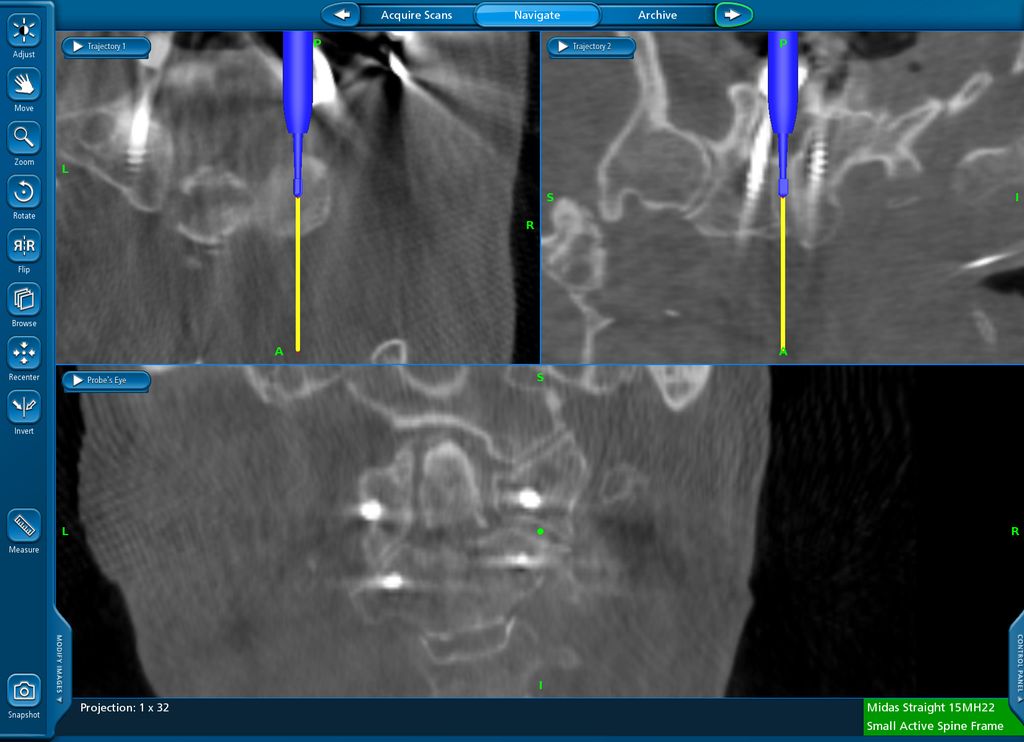
Abb. 19: Anwendung der navigierten Fräse zum Anfrischen des Gelenks C1/2 im Rahmen einer Harms-Verschraubung |

Abb. 20: Anwendung der Navigation im Rahmen der Resektion eines verkalkten thorakalen Bandscheibenvorfalls |
|
Strahlenbelastung
Die Navigation bringt eine signifikante Reduktion der Strahlenbelastung für das OP-Personal mit sich. Während der intraoperative Einsatz des CT- oder O-Arms meist zu einer höheren Strahlenexposition für die Patient:innen führt, bleibt die Dosis für das Operationsteam im Vergleich zu herkömmlicher Fluoroskopie signifikant geringer. In einer prospektiven Studie betrug die durchschnittliche Strahlenexposition des Patienten am OP-Feld etwa 43mSv bei Navigation gegenüber 28mSv bei Fluoroskopie, jedoch war die Belastung für den Operateur an der rechten Hand bei Fluoroskopie mit 566µSv deutlich höher als bei Navigation mit 49µSv (p<0,001).15 Andere Studien bestätigen, dass intraoperative CT-Navigation oder O-Arm-Technik die Strahlenbelastung für das OP-Team bis auf ein Zehntel oder weniger reduziert, da das Personal während der Bildgebung den Raum verlassen kann oder hinter einer Abschirmung steht.16 Gleichzeitig zeigen Untersuchungen, dass die Dosis für Patienten bei Navigationsverfahren vergleichbar mit klassischen CT- oder Fluoroskopie-Verfahren oder leicht höher sein kann, abhängig vom Protokoll und von der Anzahl der Scans.17 Navigation stellt somit vor allem für das OP-Personal eine effektive Maßnahme zur Strahlenexpositionsreduktion dar.15–17
Fazit
Die Navigation hat sich in der Wirbelsäulenchirurgie als wertvolles und vielfältiges Instrument etabliert, das eine hohe Präzision ermöglicht und die Strahlenbelastung für das OP-Personal minimiert. Mit der zunehmenden Weiterentwicklung und auch Akzeptanz der Systeme ist in Zukunft eine noch breitere Anwendung der spinalen Navigation zu erwarten.
Literatur:
1 Helm PA et al.: Spinal navigation and imaging: History, trends, and future. IEEE Trans Med Imaging 2015; 34(8): 1738-46 2 Rahmathulla G et al:. Intraoperative image-guided spinal navigation: technical pitfalls and their avoidance. Neurosurg Focus 2014; 36(3): E3 3 Otomo N et al.: Computed tomography-based navigation system in current spine surgery: A narrative review. Medicina (Kaunas) 2022; 58(2) 4 Al-Naseem AO et al.: Robot-assisted pedicle screw insertion versus navigation-based and freehand techniques for posterior spinal fusion in scoliosis: a systematic review and meta-analysis. Spine Deform 2024; 12(5): 1203-15 5 Meng X et al.: Computer navigation versus fluoroscopy-guided navigation for thoracic pedicle screw placement: a meta-analysis. Neurosurg Rev 2016; 39(3): 385-91 6 Papalia GF et al.: Higher accuracy and better clinical outcomes in navigated thoraco-lumbar pedicle screw fixation versus conventional techniques : A systematic review and meta-analysis. Spine (Phila Pa 1976) 2024; 49(19): 1370-80 7 Tarawneh AM et al.: The comparative accuracy and safety of fluoroscopic and navigation-based techniques in cervical pedicle screw fixation: systematic review and meta-analysis. J Neurosurg Spine 2021; 35(2): 194-201 8 Ito Z et al.: Pedicle screws can be 4 times stronger than lateral mass screws for insertion in the midcervical spine: a biomechanical study on strength of fixation. J Spinal Disord Tech 2014; 27(2): 80-5 9 Aspalter S et al.: Accuracy of navigated high-speed drill-assisted cervical and upper thoracic pedicle screw placement—A single center experience with 1112 pedicle screws. J Clin Med 2025; 14(18): 6597 10 Sanker V et al.: Comparative analysis between cortical bone trajectory (CBT) screw fixation and traditional pedicle screw fixation in lumbar spine surgery: A systematic review and meta-analysis. Cureus 2025; 17(7): e87944 11 Santoni BG et al.: Cortical bone trajectory for lumbar pedicle screws. Spine J 2009; 9(5): 366-73 12 Urakawa H et al.: The feasibility of 3D intraoperative navigation in lateral lumbar interbody fusion: perioperative outcomes, accuracy of cage placement and radiation exposure. Global Spine J 2023; 13(3): 737-44 13 Xi Z et al.: The navigated oblique lumbar interbody fusion: accuracy rate, effect on surgical time, and complications. Neurospine 2020; 17(1): 260-7 14 Liu X et al.: Analysis of intraoperative cone-beam computed tomography combined with image guidance for lateral lumbar interbody fusion. Oper Neurosurg 2018; 14(6): 620-6 15 Bratschitsch G et al.: Radiation exposure of patient and operating room personnel by fluoroscopy and navigation during spinal surgery. Sci Rep 2019; 9(1): 17652 16 Mendelsohn D et al.: Patient and surgeon radiation exposure during spinal instrumentation using intraoperative computed tomography-based navigation. Spine J 2016; 16(3): 343-54 17 Reynolds AW et al.: Patient radiation exposure associated with the use of computer navigation during spinal fusion. Int J Spine Surg 2020; 14(4): 534-7
Das könnte Sie auch interessieren:

Arthroskopische Behandlung von Glenoidrandfrakturen
In der Literatur werden die Begriffe knöcherne Bankart-Läsion und Glenoidrandfraktur häufig synonym verwendet, obwohl sie sich hinsichtlich Pathomechanismus und Therapie deutlich ...

Häufig eingesetztes Eisenpräparat erhöht Frakturrisiko
Obwohl moderne Eiseninfusionen als effizient und gut verträglich gelten, zeigen Forschende der Medizinischen Universität Innsbruck in einer aktuellen Beobachtungsstudie, dass ...

Fitness-Boom mit Schattenseite
Zunehmend junge Patient:innen nehmen wegen Schulterbeschwerden orthopädische Hilfe in Anspruch. Eine Expertin ortet die Ursache vor allem in Überlastungen beim Krafttraining im ...