
Deformitätenkorrektur mit computergestütztem Hexapoden-Fixateur
Sie sind bereits registriert?
Loggen Sie sich mit Ihrem Universimed-Benutzerkonto ein:
Sie sind noch nicht registriert?
Registrieren Sie sich jetzt kostenlos auf universimed.com und erhalten Sie Zugang zu allen Artikeln, bewerten Sie Inhalte und speichern Sie interessante Beiträge in Ihrem persönlichen Bereich
zum späteren Lesen. Ihre Registrierung ist für alle Unversimed-Portale gültig. (inkl. allgemeineplus.at & med-Diplom.at)
In den vergangenen Jahren haben sich die Softwareprogramme für computergestützte Fixateure deutlich weiterentwickelt. Dies macht die Verwendung einerseits genauer und erlaubt andererseits auch weniger geübten Usern, einfache Deformitäten erfolgreich zu korrigieren. Trotz dieser technischen Erleichterungen bleiben die Deformitätenkorrektur und Beinverlängerung mit Fixateur externe eine hochspezialisierte Behandlung. Eine stabile Fixateurmontage sowie Erfahrung mit den Prinzipien der Kallusdistraktion, dem postoperativen Management und möglichen Schwierigkeiten und Komplikationen ist erforderlich.
Keypoints
-
Hexapoden-Fixateure der neuesten Generation sind dank der weiterentwickelten Software deutlich einfacher zu programmieren und zu steuern.
-
Die Smart-TSF-Software des Taylor Spatial Frames erlaubt die Korrekturplanung nach Upload der postoperativen Röntgen und erkennt selbstständig die meisten erforderlichen Parameter.
-
Trotz dieser deutlichen Vereinfachung der Hard- und Software müssen die klassischen biologischen und mechanischen Prinzipien beherrscht und berücksichtigt werden.
-
Auch das postoperative Management und die Nachbehandlung erfordern Erfahrung, um gute und sichere Ergebnisse zu erzielen.
Was bisher geschah…

Abb. 1: Der Prototyp des schließlich 1997 vorgestellten Taylor Spatial Frames (TSF) hatte noch „ball joints“ statt der späteren „universal hinges“ und fixe Stäbe (Struts), die nicht vom User gewechselt werden konnten
Ende der 1990er-Jahre wurden die ersten Hexapoden-Fixateure vorgestellt (Abb.1), wobei schließlich der Taylor Spatial Frame (TSF) (Smith & Nephew, Memphis, TN, USA) kommerziell erhältlich war und entsprechend klinisch zum Einsatz kam. Dieser computergestützte Hexapode erlaubt eine Bewegung zweier Ringe zueinander in jeder Ebene des Raumes und damit die Möglichkeit der dreidimensionalen Deformitätenkorrektur und Beinverlängerung. Zuvor verwendete Ringfixateure, wie der Ilizarov-Ringfixateur, hatten klassische Gelenke und damit eine starre Drehachse, um die die Korrektur in einer Ebene durchgeführt werden konnte. Eine gleichzeitige Verlängerung war nur über komplizierte Anordnung dieser Gelenke oder nach Fixateuradaptierungen in Narkose möglich. Eine Rotationskorrektur war ebenfalls nur sehr schwer und nach entsprechendem Umbau durchführbar. An unserer Abteilung wurde der TSF 1999 zum ersten Mal verwendet. Die simultane dreidimensionale Korrekturmöglichkeit führte bei unseren Patienten zu einer deutlichen Verbesserung der Präzision der Korrektur, besonders von mehrdimensionalen Fehlstellungen, was wir 2007 in einer Studie zeigen konnten.1
Schwierig war jedoch die Programmierung der Software zur Steuerung des TSF, die in der ersten Version lediglich aus einer Exceldatei mit entsprechenden eingebetteten Formeln bestand. Selbst bei größter Umsicht kam es hier fallweise zu Überraschungen bei der Richtung der Korrektur. Erst etwa 2002 wurde das erste tatsächliche Softwareprogramm (auf Windows 97) vorgestellt. 2003 folgte schließlich eine webbasierte Version, wobei hier die Fehlstellung auch grafisch dargestellt wurde. Der erste Schritt zu einer einfacheren, aber auch sicheren Anwendung erfolgte 2011, da nun die Fehlstellung und die Position der Ringe sowie der Frame selbst symbolisch in der Software dargestellt wurden. Somit konnte visuell die Richtigkeit der Deformitäten-, Frame- und Mounting-Parameter überprüft werden. In dieser Version waren erstmals auch eigene Abläufe zur Korrektur komplexer Fußfehlstellungen enthalten. Mit diesen bisherigen Versionen wurden von 1999 bis 2020 etwa 1600 Segmente an unserer Abteilung korrigiert.
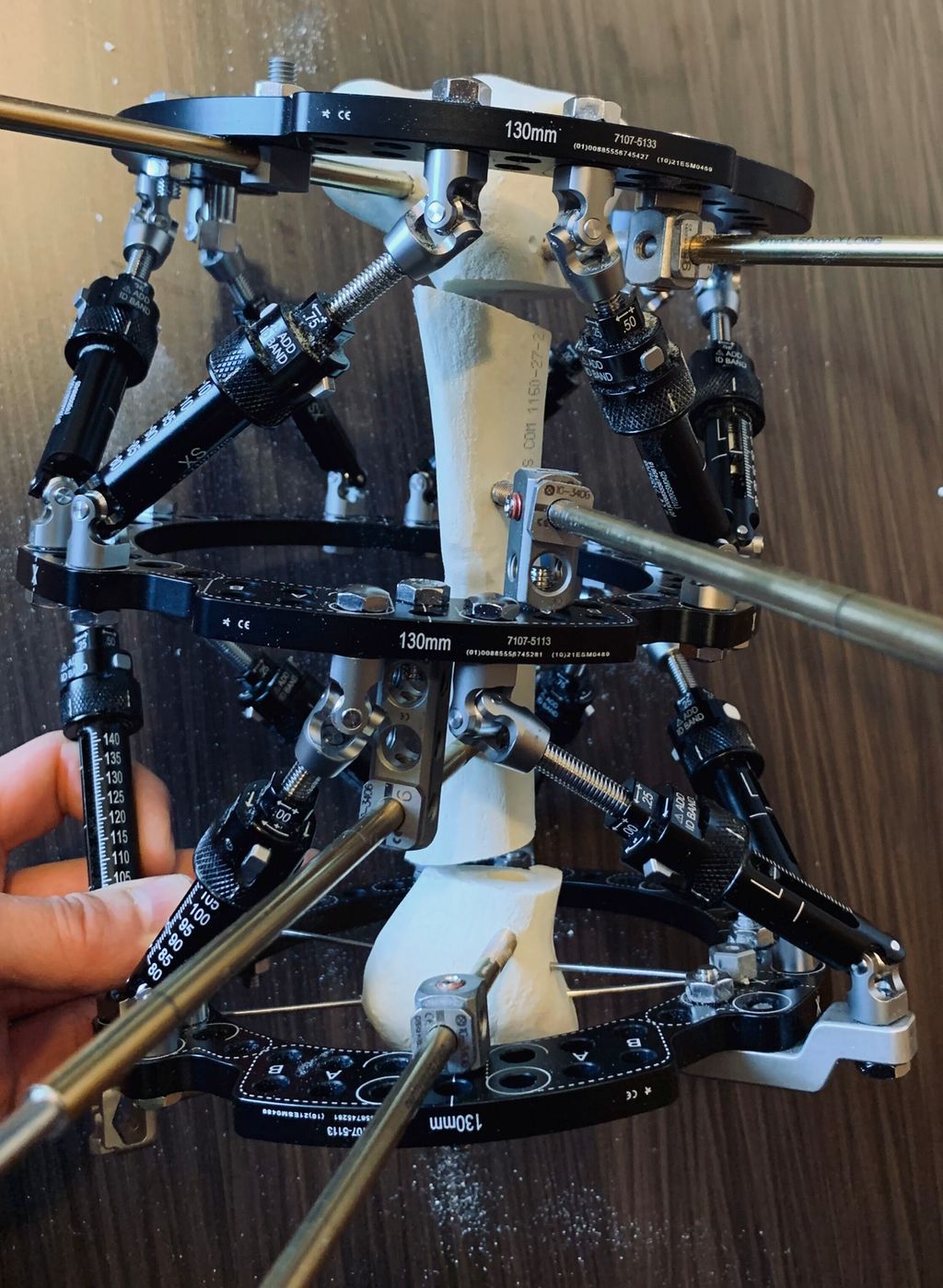
Abb. 2: Für die neueste Generation des TSF stehen vier Strut-Familien zur Verfügung, wobei Smart-Standard- und Smart-FX-Struts eine Distraktion mit 0,25-mm-Schritten ermöglichen. Die Struts können an unterschiedlichen Positionen fixiert werden und Step-off-Plates erlauben das Fixieren der Struts außerhalb und unterhalb des Rings, was die Montage besonders bei sehr komplexen Fehlstellungen und kleinen Knochen vereinfacht bzw. ermöglicht
Das Auslaufen des Patents von Smith & Nephew auf den TSF erlaubte schließlich auch anderen Firmen, ähnliche Fixateure vorzustellen und dafür neue Softwarelösungen zu entwickeln. Bereits 2012 wurde das TrueLok Hexapod System (TL-HEX™) (Orthofix S.R.L., Bussolengo, Verona, Italien) vorgestellt. Eine spätere Softwarelösung erlaubte hier erstmals Röntgenbilder zu laden und diese für die Korrekturplanung und Bestimmung der Mounting-Parameter zu verwenden. Der Orthex (OrthoPediatrics, Warsaw, Indiana, USA) bietet ebenfalls diese Möglichkeiten, fokussiert auch sehr spezifisch auf kinderorthopädische Anwendungen und ist in einer „Small bone“-Version verfügbar, die besonders auch für die obere Extremität interessant ist.
Nach einer langen Entwicklungszeit ist nun auch der Taylor Spatial Frame in einer neuen Version verfügbar (TSF 2.0/Smart TSF), mit neuer Hardware und verbesserter Software. Diese hat nun zusätzlich zu den gewohnten und bewährten Funktionen, sowohl bei der Software als auch bei der Hardware, die besten Neuerungen der anderen Hexapoden übernommen oder weiterentwickelt sowie eigene Neuerungen integriert (Abb. 2).
Durch die deutliche Vereinfachung der Programmierung und damit der Verwendung der Hexapoden-Fixateure ist mit einer vermehrten Anwendung auch in nicht hochspezialisierten Zentren zu rechnen. Dies ist nun ein guter Grund, das große Indikationsspektrum dieser Fixateure, aber auch die Prinzipien der Kallusdistraktion, Frame-Montage und Softwaresteuerung zu beleuchten.
Indikationen
Die ersten Veröffentlichungen zum TSF zeigten bereits das breite Spektrum, welches von Korrekturen bei Kindern2 über Korrektur von Pseudarthrosen und Knochendefekten3 sowie posttraumatischen Fehlstellungen4 bis hin zur Sprunggelenksarthrodese reicht.5
Auch an unserer Abteilung kommt der Hexapoden-Fixateur bei Patienten von 2 bis 92 Jahren zum Einsatz. Hauptindikation an unserer Abteilung sind Achskorrektur und Beinverlängerung im Kindes- und Jugendalter, wobei hier vor allem kongenitale Deformitäten (kongenitaler Femurdefekt, Fibulahemimelie, Tibiahemimelie, posteromediales Bowing) (Abb. 3), posttraumatische Deformitäten und Deformitäten im Rahmen von Syndromen oder metabolischen Erkrankungen (XLH) behandelt werden.
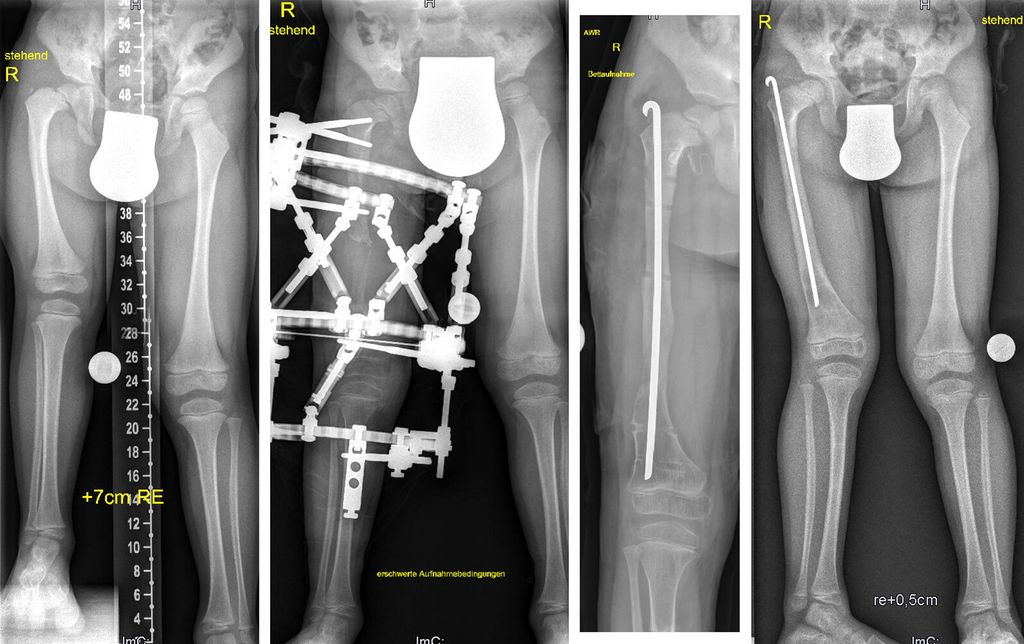
Abb. 3: Bei diesem 4-jährigen Patienten mit kongenitalem Femurdefekt (CFD) erfolgten eine Verlängerung und Achskorrektur am distalen Femur mittels TSF. Zusätzlich wurden die Retrotorsion am proximalen Femur und ein Teil der Varusfehlstellung akut korrigiert. Der Knieüberbau verhindert bei instabilem Kniegelenk bei angeborener Kreuzbandaplasie/Hypoplasie eine Subluxation des Gelenks. Das Knie wird in der Nacht in Streckung fixiert, um eine Kontraktur bei Verlängerung zu verhindern, welche in diesem Fall knapp über 5cm betrug. Um eine Fraktur des unreifen Kallus, wie sie bei CFD häufig ist, zu verhindern, erfolgte simultan mit dem Apparatabbau eine Fixierung mit Rush-Pin. Dieser wurde 9 Monate später nach Röntgenkontrolle wieder entfernt. Der rezidivierende Valgus, der bei CFD typisch ist, kann zwischen den Verlängerungsschritten mittels Wachstumslenkung einfach korrigiert werden
Bei Erwachsenen sind es ebenfalls erworbene und angeborene Fehlstellungen, wobei hier Pseudarthrosen (Abb. 4), infizierte Pseudarthrosen sowie nicht verheilte Arthrodesen am Fuß und Sprunggelenk hinzukommen. Bei der simplen Beinverkürzung ohne oder mit geringer Achsabweichung hat der Verlängerungsmarknagel (Precice®, Nuvasive Inc.) den externen Fixateur abgelöst. Dieser Verlängerungsmarknagel kann über einen antegraden Zugang am Oberschenkel ab dem 8.–10. Lebensjahr verwendet werden und über einen femoralen retrograden Zugang oder nach Fugenschluss an der Tibia eingesetzt werden.
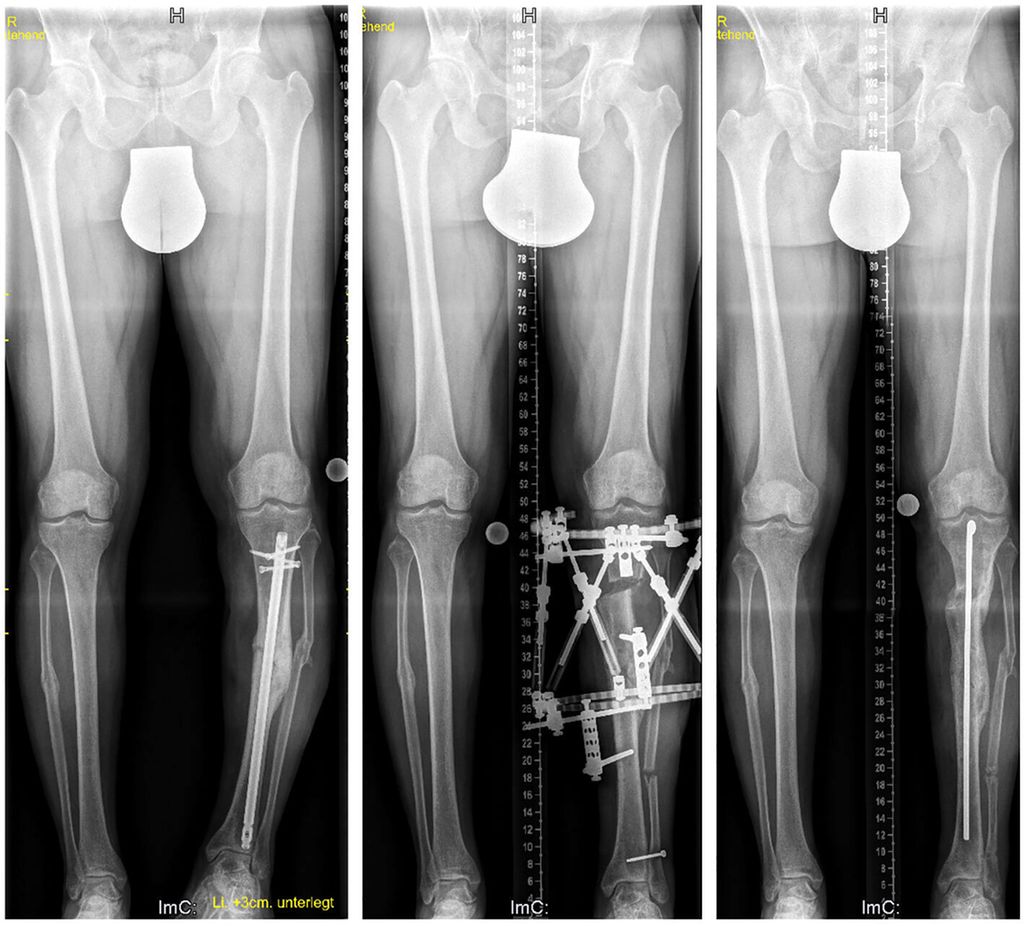
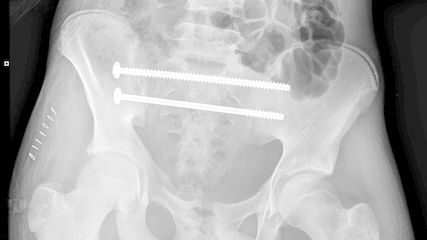
Abb. 4: Dieser 42-jährige Patient erlitt eine offene Unterschenkelfraktur, die sich trotz initialen Fixateurs externe infizierte. Es erfolgten eine Lappenplastik und schließlich eine Osteosynthese mit Marknagelung. Bei der Vorstellung 4 Jahre nach dem initialen Trauma zeigten sich eine Varusfehlstellung und eine Beinverkürzung von 1,7 cm. Der Nagel wurde entfernt und eine Osteotomie proximal der ehemaligen Fraktur durchgeführt. Auch in diesem Fall wurde nach Apparatabbau ein Rush-Pin zur weiteren Stabilisierung eingebracht. Die Beinlänge und Beinachse konnten vollständig korrigiert werden
Für alle Indikationen, Größen und Gewichtsklassen steht uns prinzipiell dieselbe Hardware zur Verfügung. Die Ringe und Verlängerungs-Struts sind in unterschiedlichen Größen verfügbar, aber alle untereinander voll kompatibel. Dies erlaubt ein Maximum an Flexibilität, und besonders mit den neuen „Step-off-Plates“ des TSF 2.0. können somit alle denkbaren Fehlstellungen adressiert werden.
Prinzipien der Kallusdistraktion/Fixateur-externe-Montage
Die Prinzipien der Kallusdistraktion und externen Fixation zur Knochenverlängerung, aber auch die Behandlung von infizierten Pseudarthrosen oder nicht verheilten Arthrodesen gehen auf Ilizarov zurück.6 Seine Beobachtung, dass bei langsamer Distraktion Knochen in einem Frakturspalt gebildet werden kann, belegte er in detaillierten Forschungen, wobei er auch die optimale Rate der Distraktion und den Einfluss von Stabilität und Mikrobewegungen auf den Kallus untersuchte. Die empfohlene Distraktion von viermal ¼mm pro Tag wie auch die biologischen Überlegungen bei der Osteotomie und Fixation wurden später von Aronson in weiteren Studien bestätigt.7

Abb. 5: Für eine gute Stabilität der Ringmontage ist die entsprechende Verteilung der Half-Pins ausschlaggebend. Bei starken Fehlstellungen sollen die Pins bis nahe an die Fraktur/Osteotomie heranreichen. Bei der Knochenverlängerung ist es günstig, wenn der distalste Pin des proximalen Rings und der proximalste Pin des distalen Rings etwas Abstand haben, damit nicht zu viel Spannung auf die Haut ausgeübt wird. Bei Verlängerungen über etwa 3cm wird der Fuß im Fixateur mitfixiert, um eine Spitzfußstellung nach Verlängerung zu verhindern
Neben diesen biologischen Überlegungen sind auch die Prinzipien der stabilen Ringmontage wichtig und entscheiden oft über Erfolg oder Misserfolg.8 Eine ausreichende Stabilität ist sowohl für das Erreichen der Korrektur als auch für die Knochenheilung entscheidend. Nur wenn der Fixateur dauerhaft stabil mit dem Knochensegment verbunden ist, kommt die geplante Korrektur auch unverändert an. Oft werden zu dünne Half-Pins verwendet oder ein fehlerhaftes Pin-Management an den Weichteilen führt zu Pin-Infekten und folglich zu Lyse und Instabilität.
Bei Adoleszenten und Erwachsenen verwenden wir grundsätzlich 6-mm-Half-Pins. Nur bei Kindern kommen 4,5-mm-Half-Pins zum Einsatz. Weiters ist die Verteilung der Half-Pins zueinander wichtig. Das Knochensegment ist umso stabiler fixiert, je mehr sich der Winkel der Half-Pins an 90° annähert.9 Auch in vertikaler Richtung müssen die Pins entsprechenden Abstand haben, um das Segment stabil zu fassen (Abb. 5). Je nach Größe und Gewicht des Patienten und je nach Indikation werden üblicherweise 3 Half-Pins oder 2 Half-Pins und 2 Bohrdrähte pro Segment verwendet. Im diaphysären Bereich verwenden wir keine Bohrdrähte, weil diese die Weichteile und damit die Mobilisierung stören.
Half-Pins müssen schonend eingebracht werden. Wenn die Haut durch den Bohrer oder die Hülsen geschädigt wird, führt dies zu Hautrandnekrosen. Auch beim Bohren ist auf scharfe Bohrer, langsame Drehzahl und gelegentliches Spülen zu achten, um den Knochen vor Hitze und Verbrennung zu schützen. Werden diese Prinzipien nicht eingehalten, entsteht totes Gewebe um den Half-Pin, das sehr anfällig für Infekte des Pin-Haut-Interfaces und schließlich auch des Knochens ist. Um besser einzuwachsen, sind moderne Pins mit Hydroxylapatit beschichtet, was zusätzlich auch hilft, Infektionen zu verhindern. Diese Beschichtung zieht sich bei den neuesten Pins bis über das Hautniveau.
Prinzipien von Hexapoden-Fixateuren
Das Prinzip des Hexapoden beruht auf der Stewart/Gough-Plattform und wird auch in Radioteleskopen und Flugsimulatoren verwendet. Alle zur Deformitätenkorrektur verwendeten Hexapoden beruhen auf dem Prinzip, dass ein Drehpunkt in Relation zu dem Ringsystem definiert wird. Einer der beiden Ringe wird als Referenzring definiert und fixiert das Referenzfragment, während der andere Ring als Moving-Ring am Moving-Fragment fixiert ist. Sodann wird ein (Dreh-)Punkt im Raum definiert, um den die Rotation der Achskorrektur stattfindet. Hier liegt auch der große konzeptuelle Unterschied zu klassischen Fixateuren: Während bei diesen um eine Drehachse zwischen 2 Scharniergelenken eindimensional gedreht wurde, können Hexapoden um einen Drehpunkt in allen Dimensionen korrigieren. Hierfür wird der Drehpunkt in Relation zur Mitte des Referenzrings in einem 3D-Koordinatensystem (x-,y-,z-Achse) definiert.
Der Drehpunkt des Hexapoden (Origin) muss nun auf den Apex/CORA (Drehpunkt) der Fehlstellung gelegt werden. Um diesen zu finden, ist zunächst eine Deformitätenplanung erforderlich. Der Apex wird durch die Verwendung von Referenzlinien der beiden Knochensegmente bestimmt. Hierfür kann eine diaphysäre Linie die Achse des Segments definieren oder es wird der erwünschte Winkel zwischen der Gelenksfläche und der Achse des Knochensegments verwendet, um die Linie zu definieren.10 Diese präoperative Planung gibt somit die Deformitätenparameter an, wobei die erforderliche Verlängerung und eine etwaige Torsionskorrektur noch berücksichtigt werden müssen.

Abb. 6: Der „Beacon“ ermöglicht einerseits die Kalibrierung und andererseits die automatische Detektion der Mounting-Parameter. Das Röntgen hierfür muss streng a.p. und seitlich durchgeführt werden, da auch die Ringrotation („axial-view“ Mounting-Parameter) danach bestimmt wird
Die Software der Hexapoden benötigt nun die Relation des Drehpunkts des Hexapoden (Origin) zur Mitte des Referenzringes im 3D-Koordinatensystem (Mounting-Parameter). Diese wurden früher anhand von Röntgen und darauffolgender Kalibrierung und Vermessung im PACS manuell durch den Chirurgen bestimmt. Nach Eingabe der Hardware/Frame-Parameter (Ringgröße, Struts etc.) konnte dann die Software ein Korrekturprogramm für die individuelle Deformität erstellen.
Besonders bei gleichzeitiger Verlängerung und Achskorrekturen waren noch zusätzliche Faktoren für die korrekte Positionierung des Drehpunkts des Hexapoden (Origin) erforderlich. Dies machte die Anwendung insgesamt recht kompliziert und wenig intuitiv, was sich bei Kursen und Fortbildungen zu diesem Thema stets bemerkbar machte.
Die neue Software des TSF (SmartTSF) vereinfacht nun all diese Schritte. Hier werden nach Angabe der Lokalisation und Eingabe der verwendeten Hardware postoperative Röntgen in 2 Ebenen eingegeben. Diese müssen streng a.p. und seitlich durchgeführt werden und müssen ein Kalibrierungs- und 3D-Ortungstool (Beacon) mitabgebildet haben (Abb. 6). In der Software kann nun unter Verwendung des Workflows „SuperDot“ das Moving-Fragment ausgeschnitten und mit der Maus in die entsprechend korrigierte und/oder verlängerte Position gezogen werden (Abb. 7). Um die exakte anatomische Position/Korrektur zu finden, stehen Hilfslinien bereit, die die Planung bei diesem Schritt ermöglichen. Aus der gewählten Position entnimmt die Software automatisch die Deformitätenparameter. Es stehen auch noch der Workflow „TraumaDot“ für Frakturen und der Workflow „Origin & CP“ für sehr geübte klassische Anwender zur Verfügung.
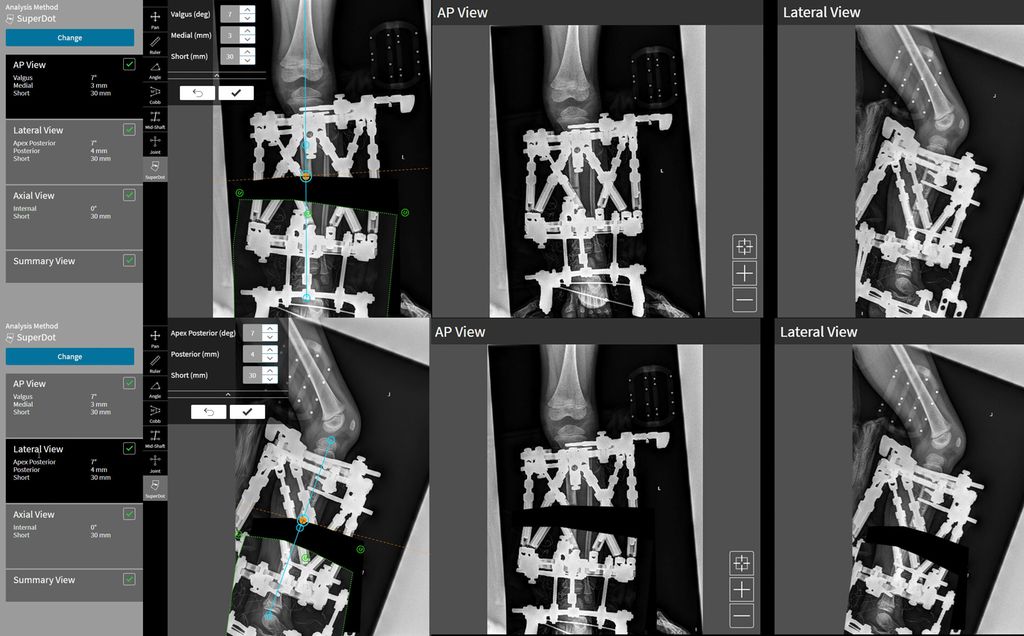
Abb. 7: Bei der „SuperDot“-Planung kann das Moving-Fragment, in diesem Fall das distale Segment, einfach in die gewünschte Position gezogen und rotiert werden. Daraus werden die Deformity-Parameter automatisch kalkuliert. Das Prä- und das Post-Korrektur-Bild werden für beide Ebenen simuliert
Der neue Workflow macht die Verwendung der Software schneller, präziser und auch sicherer. Zusätzlich gibt es für die Patienten die Möglichkeit, die Drehprogramme über eine Smartphone-App anzuzeigen und die Adjustierungen an den Struts zu bestätigen (Abb. 8). Dies gibt dem Patienten Kontrolle und Ownership über seine Korrektur und den Verlängerungsverlauf.
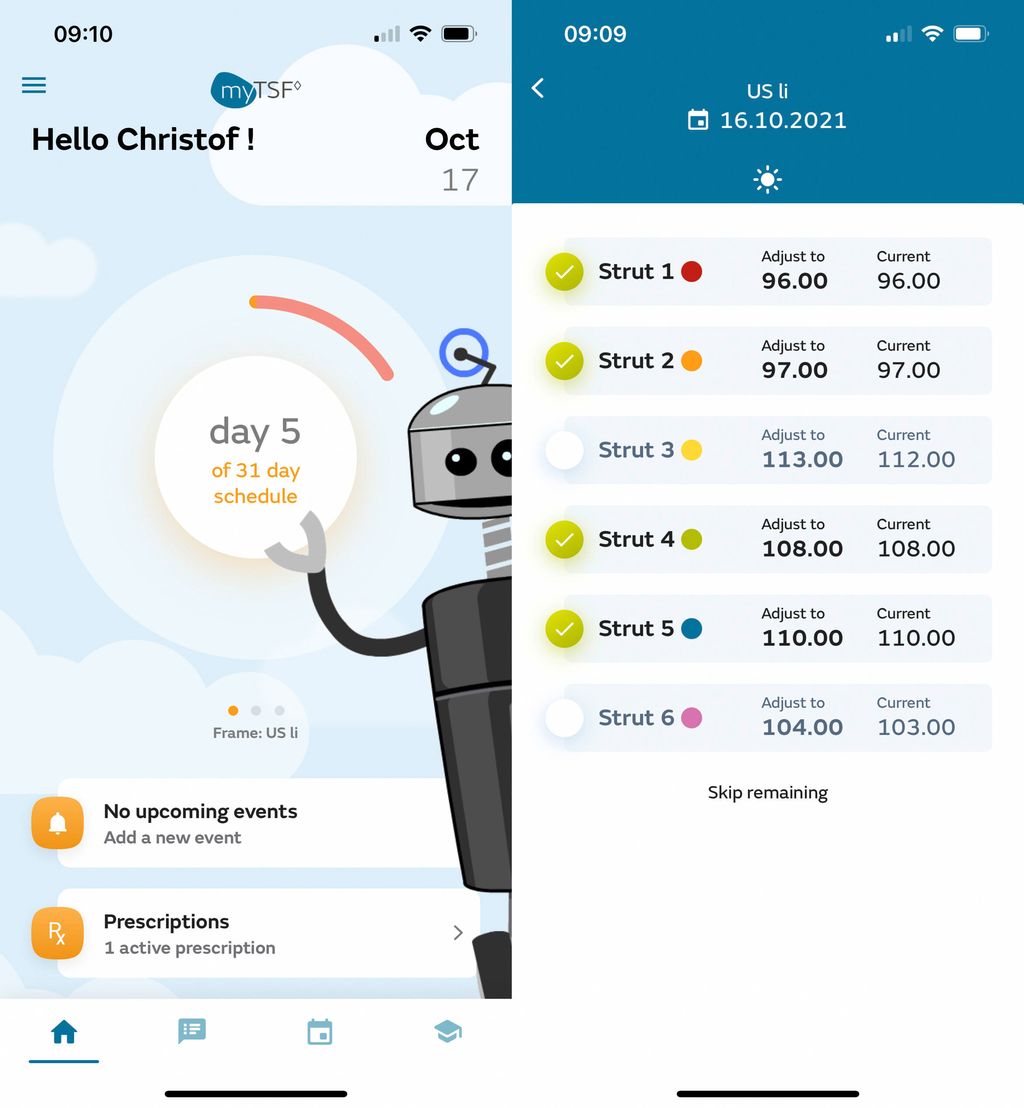
Abb. 8: Die Smart-TSF-App inkludiert einen Pediatric Mode, bei dem die Benutzeroberfläche kindgerechter gestaltet ist. Das Drehprogramm ist täglich abrufbar und die Adjustierungen können in der Software bestätigt werden
Nachbehandlung – nach der Operation ist vor der Herausforderung
Nach der Operation beginnt die Korrektur oder Verlängerung am 6. bis 7. postoperativen Tag. Die Mobilisierung erfolgt üblicherweise ab dem 2. postoperativen Tag mit Abrollen oder Teilbelasten, je nach Indikation und Alter, Größe und Gewicht des Patienten. Eine Physiotherapie muss besonders intensiv bei der Beinverlängerung durchgeführt werden. Wöchentliche Kontrollen sind erforderlich, um drohende Komplikationen rechtzeitig zu entdecken und noch vor deren Auftreten gegensteuern zu können. Pin-Infekte kündigen sich meist durch Schmerzen und milde Rötung am Half-Pin/Bohrdraht an und können in diesem Stadium sehr einfach mit einer oralen Antibiose für 5–7 Tage behandelt werden. Antibiotische oder auch sonstige Salben oder okklusive Wundbehandlungen sind an Half-Pins und Drähten kontraindiziert, da sie den Abfluss des Wundsekrets verhindern und Infekte verstärken. Bei den Kontrollen sind regelmäßig Röntgen erforderlich, wobei hier die angrenzenden Gelenke mitabgebildet werden müssen. Bei langstreckigen Verlängerungen muss bereits präoperativ auf die Gelenksstabilität geachtet werden. Das richtige Ausmaß der Mobilisierung ist für die Kallusbildung wichtig. Bei schlechter Kallusbildung muss die Distraktionsrate verringert und/oder die Mobilisierung gesteigert werden. Die Entfernung des Apparats ist bei ausreichender Mineralisierung und Aushärtung des Kallus möglich, wofür es leider wenig definitive Parameter gibt. Es sind das Röntgenbild und die zu erwartende Compliance zu berücksichtigen; bei Korrekturen an der Tibia kann ein Oberunterschenkelgips für 4 Wochen den neuen Knochen noch schützen. Generell wird nach Apparatabbau eine Teilbelastung für 6 Wochen empfohlen.
Schlussfolgerung
Computergesteuerte Hexapoden sind wie geschaffen, um durch Auto-CAD-Funktionen sowie Artificial Intelligence ihr volles Potenzial zu entfalten. Es stehen uns nun mit der neuesten Generation Fixateure zur Verfügung, die dies in vollem Maße umsetzen. Das Indikationsspektrum für diese Fixateure ist enorm groß und wird in unseren Breiten durchaus unterschätzt. Die einfache Anwendung der neuen Hexapoden wird dies eventuell ändern. Dabei ist es wichtig, sich nicht nur mit der neuen faszinierenden Hardware und Software, sondern auch mit den beschriebenen Prinzipen, biologischen Voraussetzungen und Besonderheiten in der Nachbehandlung zu beschäftigen.
Literatur:
1 Manner HM et al.: Accuracy of complex lower-limb deformity correction with external fixation: a comparison of the Taylor Spatial Frame with the Ilizarov ring fixator. J Child Orthop 2007; 1(1): 55-61 2 Eidelman M et al.: Correction of deformities in children using the Taylor spatial frame. JPediatr Orthop B 2006; 15(6): 387-95 3 Rozbruch SR et al.: Repair of tibial nonunions and bone defects with the Taylor Spatial Frame. J Orthop Trauma 2008; 22(2): 88-95 4 Ganger R et al.: Correction of post-traumatic lower limb deformities using the Taylor spatial frame. Int Orthop 2010; 34(5): 723-30 5 Tellisi N et al.: Limb salvage reconstruction of the ankle with fusion and simultaneous tibial lengthening using the Ilizarov/Taylor spatial frame. HSS J 2008; 4(1): 32-42 6 Ilizarov GA: Clinical application of the tension-stress effect for limb lengthening. Clin Orthop Relat Res 1990; (250): 8-26 7 Aronson J et al.: The histology of distraction osteogenesis using different external fixators. Clin Orthop Relat Res 1989; (241): 106-16 8 Aronson J et al.: Mechanical induction of osteogenesis: the importance of pin rigidity. J Pediatr Orthop 1988; 8(4): 396-401 9 Fragomen AT et al.: Chapter 3. Mechanical principles of the Ilizarov method. In: Rozbruch RS, Ilizarov S (eds): Limb lengthening and reconstruction surgery. New York: Informa Healthcare, 2007. 43-52 10 Paley D et al.: Deformity planning for frontal and sagittal plane corrective osteotomies. Orthop Clin North Am 1994; 25(3): 425-65
Das könnte Sie auch interessieren:

Die Zugschrauben-Osteosynthese bei Frakturen des Dens axis
Frakturen des Dens axis zählen mit 10–20% aller zervikalen Wirbelsäulenfrakturen, zumindest bei älteren Patient:innen, zu den häufigsten Verletzungen an der oberen Halswirbelsäule (HWS ...

Versorgungskonzepte bei Frakturen der ankylosierenden Wirbelsäule
Die axiale Spondylarthritis (axSpA) stellt ein Spektrum chronisch-entzündlicher Erkrankungen dar, das sowohl die nichtradiografische als auch die radiografische Form umfasst. Die mit den ...
Die transiliosakrale Verschraubung bei Sakrumfrakturen
Das Spektrum der Sakrumfrakturen reicht von Hochrasanztrauma bis hin zu osteoporotischen Fragilitätsfrakturen. Sakrumfrakturen treten isoliert, bei Beckenringfrakturen sowie bei ...