
Planung, Navigation und Robotik in der Hörimplantologie
Vielen Dank für Ihr Interesse!
Einige Inhalte sind aufgrund rechtlicher Bestimmungen nur für registrierte Nutzer bzw. medizinisches Fachpersonal zugänglich.
Sie sind bereits registriert?
Loggen Sie sich mit Ihrem Universimed-Benutzerkonto ein:
Sie sind noch nicht registriert?
Registrieren Sie sich jetzt kostenlos auf universimed.com und erhalten Sie Zugang zu allen Artikeln, bewerten Sie Inhalte und speichern Sie interessante Beiträge in Ihrem persönlichen Bereich
zum späteren Lesen. Ihre Registrierung ist für alle Unversimed-Portale gültig. (inkl. allgemeineplus.at & med-Diplom.at)
Die digitalisierte Medizin bietet großes Potenzial, um Eingriffe schonender und präziser durchführen zu können. Auch in der Hörimplantologie haben moderne Planungs- und Navigationsverfahren sowie roboterbasierte Assistenzsysteme in den letzten Jahren Einzug genommen. Durch den Einsatz dieser Systeme erhoffen sich Experten verbesserte chirurgische und audiologische Behandlungsergebnisse bei den Patienten.
Keypoints
-
Leistungsfähigere bildgebende Verfahren und intuitivere Softwareanwendungen führen zu einem vermehrten Einsatz präoperativer Planungsmethoden bei Hörimplantationen.
-
Die sehr hohen Genauigkeitsanforderungen in der Hörimplantologie werden von verfügbaren Navigationssystemen im Moment noch nicht erfüllt.
-
Roboterbasierte Assistenzsysteme können und sollen Ärzte nicht ersetzen, werden aber in Zukunft ein wichtiges Werkzeug sein.
Gemäß Schätzungen der WHO werden bis zum Jahr 2050 mehr als 700 Millionen Menschen – also jede/r Zehnte – an einer Hörbehinderung leiden.1 Zur Behandlung von Hörverlusten, die nicht durch herkömmliche Hörgeräte oder Chirurgie korrigiert werden können, steht eine Reihe verschiedener Implantatsysteme zur Verfügung, darunter Knochenleitungs-, Mittelohr- und Cochleaimplantate. Diese werden bereits seit Jahrzehnten erfolgreich in mikrochirurgischen Verfahren eingesetzt. Neue Technologien für die Planung und Durchführung der Eingriffe sind aber verfügbar und bieten potenziell bessere Ergebnisse nach der Implantation.
Präoperative Planungsmethoden
Aufgrund der Routinebeurteilung bei der Hörimplantation sind in der Regel präoperative Bilddaten der Patienten verfügbar. Chirurgische Planungsinstrumente können HNO-Chirurgen dabei helfen, komplexe anatomische Gegebenheiten zu beurteilen und das chirurgische Vorgehen zu planen. Besonders bei herausfordernden Fällen, wie zum Beispiel bei Malformationen oder Implantationen bei Kindern, können präoperative Planungstools durchaus von Nutzen sein.
Bei Knochenleitungsimplantaten steht die Auswertung der verfügbaren Platzverhältnisse für das einzusetzende Implantat im Vordergrund. Eine vorgängige Visualisierung und Ausmessung kann helfen, die Lage des Implantates zu optimieren (wie zum Beispiel beim gleichzeitigen Einsetzen von Knochenleitungsimplantat und Schrauben zur Befestigung von Ohrepithesen) und so Zeit während des Eingriffes sparen. Verbessertebildgebende Verfahren (z.B. die quantitative Computertomografie, Abb.1) ermöglichen zudem, mechanische Eigenschaften des Knochens im Schläfenbein abzuschätzen und in die Planung einzubeziehen.2
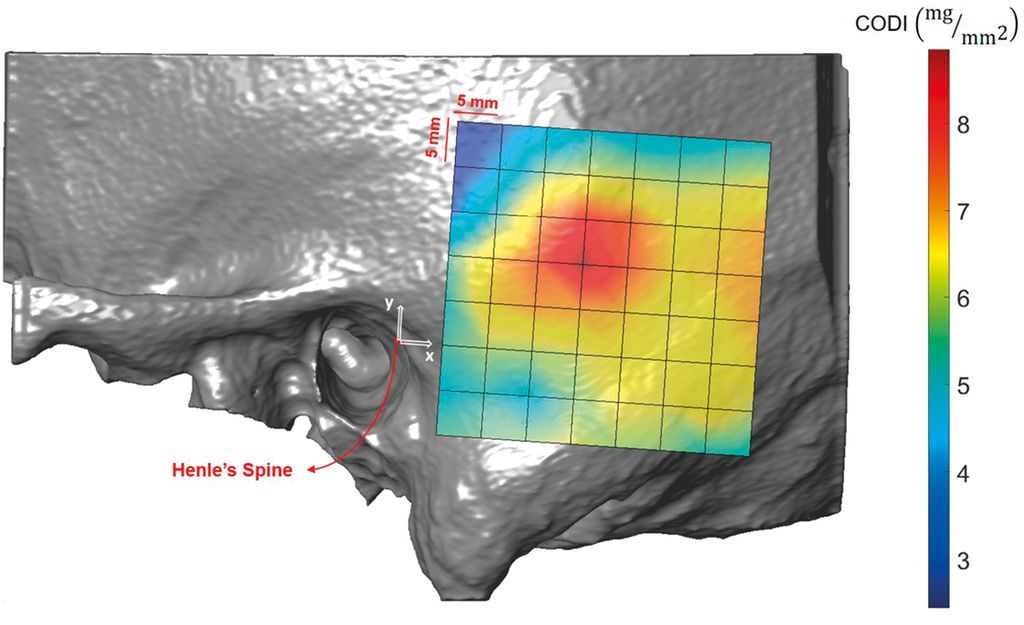
Abb. 1: Farbkodierte Darstellung der Knochenmasseverteilung am Schläfenbein (Quelle: Talon E et al. 2021)2
Eine besondere Bedeutung hat die präoperative Planung bei Cochleaimplantationen. Hier stehen die Auswahl geeigneter Elektrodenträgergrößen und die Optimierung der Einführtrajektorie in die Cochlea im Fokus. Auf der Grundlage adaptiver Modelle können anatomische Strukturen erkannt (Schläfenbein, Gesichtsnerv, Hörknöchelchen, usw.) und als dreidimensionale Objekte dargestellt werden. Bei komplizierten Fällen, wie bei einer fortgeschrittenen Otosklerose, können virtuell geplante Trajektorien helfen, den Zugang zur Cochlea möglichst schonend zu anzulegen. Die Auswahl passender Elektrodenträger erfolgt nach der Größe der Cochlea, welche beim Menschen durchaus unterschiedlich ausgeprägt ist. Zur Abschätzung der Elektrodenträgerlänge kommen einfache Abschätzungsformeln,3 intuitive Benutzeroberflächen (OTOPLAN® Planungssoftware) und neuerdings automatisierte Prozeduren basierend auf künstlicher Intelligenz zum Einsatz.4 Die vorgängige Planung des Eingriffes am dreidimensionalen Modell bietet zudem die Möglichkeit, den Einführwinkel optimal auf den Verlauf der Cochlea auszurichten, um den Widerstand beim Einführen des Elektrodenträgers zu minimieren und dadurch möglichst funktions- und strukturerhaltend zu implantieren. Die bildbasierte Planung und Auswertung bietet zudem vollkommen neue Ansätze zur Anpassung von Audioprozessoren basierend auf der Anatomie der Patienten. Dabei wird die aus bildgebenden Verfahren ermittelte Elektrodenlage innerhalb der Cochlea verwendet, um gezielt auf die ursprünglich wahrgenommene Frequenzhöhe (Tonotopie) rückzuschließen und eine möglichst natürliche Wahrnehmung zu ermöglichen.
Navigation in der Hörimplantologie
Navigationssysteme werden in der Hörimplantologie derzeit noch kaum routinemäßig eingesetzt. Als Hauptgrund kann die mangelnde Genauigkeit kommerziell erhältlicher Systeme genannt werden.5 Trotz des vorherrschenden Bedarfs und der seit Langem bekannten Anwendungsfälle ist es bisher noch nicht gelungen, Navigationssysteme anzubieten, welche die hohen Anforderungen an Genauigkeit und Präzision (unter 0,5mm) erfüllen und von Vorteil für die klinische Routinepraxis sind. Eine etablierte Methode zur Navigation ist das Nervenmonitoring, welches eine intraoperative Identifizierung der Integrität und eine qualitative Beurteilung des räumlichen Abstands des Gesichtsnervs ermöglicht. Einen vielversprechenden Ansatz für zukünftige Anwendungen in der Hörimplantation stellt die Kombination aus modernen Trackingmethoden mit roboterbasierten Implantationswerkzeugen wie bei der robotischen Cochleaimplantation dar.
Roboterbasierte Assistenzsysteme
Medizinische Robotersysteme können sich in Größe und Autonomiegrad stark unterscheiden. Bis jetzt konnten für Hörimplantationen roboterbasierte Assistenzsysteme eingesetzt werden. Ein in Bern entwickeltes System (mittlerweile vermarktet als Hearo®) ermöglicht es, einen minimalinvasiven Zugangstunnel mit einem Durchmesser von 1,8mm direkt von außen zur Cochlea zu bohren, um den Elektrodenträger des Cochleaimplantats einzusetzen.6 Um die anspruchsvolle Bohrgenauigkeit (maximale Abweichung von 0,3mm) zu erreichen, werden vor dem Eingriff vier kleine Schrauben als Referenzmarkenin den Knochen hinter dem Ohr eingesetzt. Im Anschluss wird ein hochaufgelöstes Computertomogramm erstellt und die Anatomie des Ohres dreidimensional am Computer modelliert. Der Verlauf des Bohrtunnels wird vor dem Eingriff anhand des virtuellen Ohres geplant. In der Zwischenzeit werden die Patienten für die Operation vorbereitet. Das Bohren des Zugangstunnels wird mit einem robotischen System durchgeführt, welches mehrere Sicherheitsmechanismen eingebaut hat, um die anatomischen Strukturen zu schützen. Unter anderem wird die Unversehrtheit des Gesichtsnervs ständig überprüft. Nach Abschluss des Bohrvorgangs werden die Referenzschrauben wieder entfernt, das Cochleaimplantat wird eingesetzt und der Hautschnitt vernäht. Die postoperative Bildgebung zeigt dabei deutlich den Unterschied des zu entfernenden Knochenanteils im Vergleich zwischen dem konventionellen und dem roboterassistierten Eingriff (Abb. 2). Dieses Verfahren wird derzeit in mehreren Kliniken eingesetzt (unter anderem in Bern, Wien und Antwerpen). Andere roboterbasierte Assistenzsysteme (ROSA®, RobOtol®) sind mittlerweile ebenso in der Erprobungsphase für Hörimplantationen. Roboterbasierte Systeme können in der Zukunft auch für andere Zwecke in der Hörimplantologie zum Einsatz kommen: um beispielsweise Knochenbetten auszufräsen oder vollimplantierbare Hörsysteme einzusetzen. Kleine, atraumatische Zugänge zum Innenohr könnten weiters für die Behandlung von Innenohrkrankheiten, z.B. zum Einbringen von Medikamenten oder Stammzellen, eine wichtige Rolle spielen.
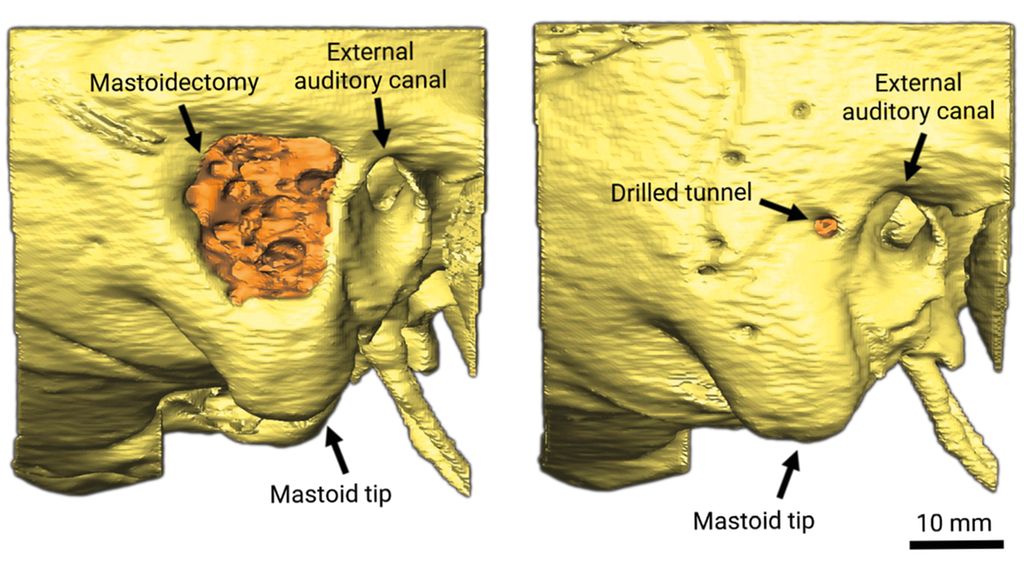
Abb. 2: Vergleich der Zugangsgröße zwischen konventioneller Mastoidektomie und roboterassistiertem Verfahren bei einer bilateral implantierten Patientin
Je nach Autonomiegrad des robotischen Systems stellen sich ethische Fragen zu Verantwortung und Haftung beim Einsatz solcher Instrumente.7 Während die Verantwortung für die Maschine (CE-Kennzeichnung) vom Hersteller übernommen wird, liegt die Verantwortung des Operierens „mediko-legal“ bei den Chirurgen. Für teilautonome Systeme stellt die Einstellung gegenüber dem neuen robotischen Verfahren von Patienten und Eltern zumindest kein Hindernis für die Anwendung dieser neuen Technologie dar.8
Ausblick
Medizinische Hightechausrüstung wird im Operationssaal der Zukunft eine immer wichtigere Rolle spielen. Im Zuge der weiteren Digitalisierung und des Einsatzes von künstlicher Intelligenz in der Medizin sowie der stetigen Verbesserung von Bildgebungsmethoden werden die bildbasiertePlanung und Simulation von chirurgischen Eingriffen in Zukunft immer wichtiger werden. Roboterbasierte Assistenzsysteme können künftig für komplexe Eingriffe mit geringen Platzverhältnissen zur Unterstützung herangezogen werden.
Literatur:
1 WHO: World report on hearing. Geneva: World Health Organization 2021 2 Talon E et al.: Quantitative analysis of temporal bone density and thickness for robotic ear surgery. Front Surg 2021; 8: 740008 3 Rathgeb C et al.: Clinical applicability of a preoperative angular insertion depth prediction method for cochlear implantation. Otol Neurotol 2019; 40(8): 1011-7 4 Neves C et al.: Fully automated measurement of cochlear duct length from clinical temporal bone computed tomography. Laryngoscope 2021; doi:10.1002/lary.29869 5 Schneider D et al.: Evolution and stagnation of image guidance for surgery in the lateral skull: asystematic review 1989–2020. Front Surg 2020; 7: 604362 6 Caversaccio M et al.: Robotic middle ear access for cochlear implantation: first in man. PLoS One 2019; 14(8): e0220543 7 Yang GZ et al.: Medical robotics-regulatory, ethical, and legal considerations for increasing levels of autonomy. Sci Robot 2017; 2(4): eaam8638 8 Jank BJ et al.: Acceptance of patients towards task-autonomous robotic cochlear implantation: An exploratory study. Int J Med Robot 2021; 17(1): 1-6
Das könnte Sie auch interessieren:

Wie Coaching den Fachärztemangel an medizinischen Abteilungen angehen kann
Hohe Arbeitsbelastung, Stress, schlechte Stimmung: An vielen Spitalskliniken ist das die tägliche Realität. Es ist daher nicht verwunderlich, dass viele Fachärzt:innen den Weg in die ...
„Ein wichtiges Projekt ist die bedingungslose Unterstützung des HPV-Impfprogrammes“
Wir sprachen mit Prim. Univ.-Prof. Dr. Martin Burian, Abteilungsleitung HNO, Kopf- und Halschirurgie im Ordensklinikum Linz, über seine Ziele als Präsident der HNO-Gesellschaft, aktuelle ...

Kognitiv-verhaltenstherapeutisches Vorgehen bei chronischem Tinnitus
Für Tinnitusbetroffene, die sich durch das Ohrgeräusch psychisch belastet und in ihrer Lebensqualität eingeschränkt fühlen, hat sich die kognitive Verhaltenstherapie (KVT) als wirksamer ...